Sebbene l’uso di bracci meccanici in sala operatoria risalga a decenni fa, l’attuale frontiera tecnologica non riguarda più soltanto la precisione del movimento o la riduzione dell’invasività, ma la capacità del robot di percepire, analizzare e reagire all’ambiente anatomico in tempo reale. Questo passaggio dai sistemi passivi a quelli intelligenti è guidato dall’integrazione di algoritmi di apprendimento profondo e modelli di visione artificiale avanzati che permettono alla macchina di distinguere i tessuti sani da quelli patologici con una precisione superiore a quella dell’occhio umano.
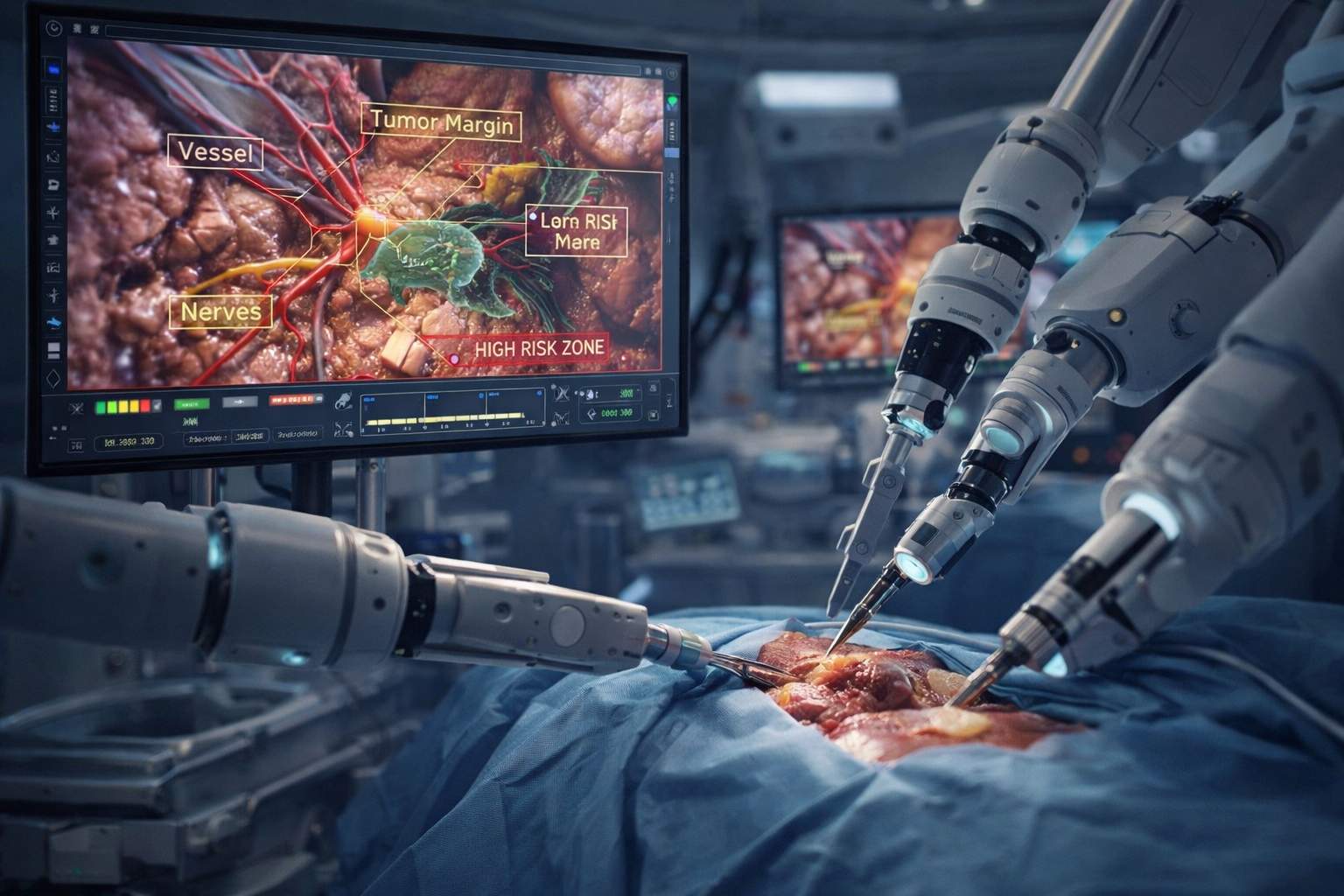
Il cuore tecnico di questa rivoluzione risiede nella capacità di elaborazione dei dati provenienti dai sensori endoscopici e dalle immagini pre-operatorie. Le moderne piattaforme chirurgiche non si limitano a trasmettere un flusso video al chirurgo, ma sovrappongono strati di dati aumentati che identificano strutture critiche come vasi sanguigni, nervi e margini tumorali. Attraverso l’uso della visione computazionale, il sistema robotico può mappare l’anatomia del paziente e fornire feedback aptici o visivi immediati, impedendo fisicamente agli strumenti di penetrare in zone identificate come ad alto rischio. Questa forma di assistenza attiva riduce drasticamente l’errore umano e standardizza i risultati clinici, indipendentemente dall’esperienza specifica del chirurgo che manovra la console.
Un aspetto fondamentale di questi sistemi intelligenti è l’implementazione dell’apprendimento per rinforzo e dell’analisi dei dati storici delle procedure. I robot chirurgici contemporanei sono progettati per apprendere dalle migliaia di ore di interventi registrati, identificando i percorsi di sutura più efficienti o le tecniche di dissezione che minimizzano il trauma tissutale. Questa conoscenza collettiva viene distillata in modelli che assistono l’operatore durante le fasi più delicate dell’intervento, automatizzando compiti ripetitivi o tecnicamente complessi come la sutura in spazi ristretti. La transizione verso l’autonomia parziale non mira a sostituire il medico, ma a liberarlo dal carico cognitivo derivante dalla gestione meccanica della strumentazione, permettendogli di concentrarsi sulla strategia chirurgica complessiva.
L’architettura hardware di queste macchine è stata parallelamente riprogettata per supportare tali capacità analitiche. L’integrazione di sensori di forza avanzati sulla punta degli strumenti permette al sistema di percepire la resistenza dei tessuti, una sensazione che viene poi tradotta digitalmente per il chirurgo. Questa telepresenza avanzata, combinata con l’intelligenza artificiale, consente di compensare automaticamente anche i minimi tremori della mano o i movimenti involontari del paziente, come la respirazione o il battito cardiaco, stabilizzando il campo operatorio in modo virtuale. La sincronizzazione tra i dati sensoriali e l’esecuzione motoria avviene con latenze quasi nulle, garantendo una fluidità d’azione necessaria per gli interventi di microchirurgia.
Infine, la connettività e la gestione dei dati su cloud giocano un ruolo cruciale nella manutenzione e nel miglioramento continuo di queste piattaforme. Ogni intervento eseguito contribuisce a un database globale che affina costantemente gli algoritmi di riconoscimento dei tessuti e di previsione delle complicanze. Questo ecosistema interconnesso trasforma ogni singola sala operatoria in un nodo di una rete neurale vasta e in continua evoluzione, dove la robotica non è più un semplice strumento meccanico, ma un partner digitale attivo capace di evolvere le proprie competenze tecniche attraverso l’esperienza accumulata su scala mondiale. Il risultato è una medicina di precisione estrema, dove la tecnologia agisce come un moltiplicatore delle capacità umane per migliorare la sicurezza e i tempi di recupero dei pazienti.