Il robot OpenAI basato sull’intelligenza artificiale ha imparato come risolvere il cubo di Rubik con una sola mano
L’organizzazione di ricerca sull’intelligenza artificiale OpenAI ha raggiunto una nuova pietra miliare nella sua ricerca per costruire robot di autoapprendimento per scopi generali. La divisione robotica del gruppo afferma che Dactyl, la sua mano robotica umanoide sviluppata per la prima volta l’anno scorso , ha imparato a risolvere il cubo di Rubik con una sola mano. OpenAI vede l’impresa come un balzo in avanti sia per la destrezza delle appendici robotiche sia per il proprio software di intelligenza artificiale, che consente a Dactyl di apprendere nuovi compiti utilizzando simulazioni virtuali prima che venga presentata una vera sfida fisica da superare.
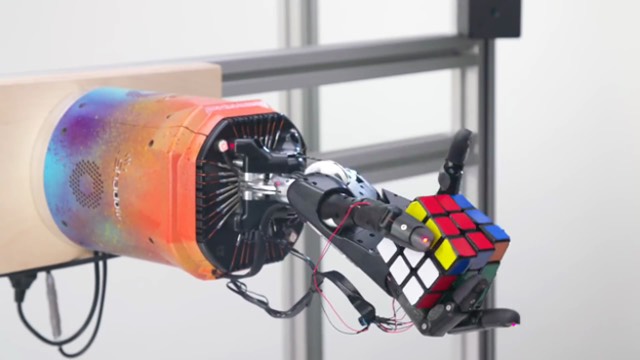
In un video dimostrativo che mostra il nuovo talento di Dactyl, possiamo vedere la mano robotica farsi strada verso un cubo completo risolversi con manovre goffe ma accurate. Ci vogliono molti minuti, ma Dactyl è finalmente in grado di risolvere il puzzle. È in qualche modo inquietante vedere in azione, anche se solo perché i movimenti sembrano notevolmente meno fluidi di quelli umani e particolarmente sconnessi se confrontati con la velocità accecante e la destrezza cruda in mostra quando un speedcuber umano risolve il cubo in pochi secondi .
Ma per OpenAI, il successo di Dactyl porta un passo avanti verso un obiettivo molto ricercato per le più ampie industrie dell’IA e della robotica: un robot che può imparare a svolgere una varietà di compiti nel mondo reale, senza dover allenarsi per mesi o anni tempo del mondo reale e senza la necessità di essere programmati in modo specifico.
“Molti robot possono risolvere i cubi di Rubik molto velocemente. La differenza importante tra quello che hanno fatto lì e quello che stiamo facendo qui è che quei robot sono costruiti appositamente per loro “, afferma Peter Welinder, ricercatore e capo robotico di OpenAI. “Ovviamente non è possibile utilizzare lo stesso robot o lo stesso approccio per eseguire un’altra attività. Il team di robotica di OpenAI ha ambizioni molto diverse. Stiamo cercando di costruire un robot per tutti gli usi. Simile a come gli umani e come le nostre mani umane possono fare molte cose, non solo un compito specifico, stiamo provando a costruire qualcosa che è molto più generale nel suo ambito. “
Welinder fa riferimento a una serie di robot negli ultimi anni che hanno spinto il cubo di Rubik a risolvere ben oltre i limiti delle mani e delle menti umane. Nel 2016, il produttore di semiconduttori Infineon ha sviluppato un robot appositamente per risolvere un cubo di Rubik a velocità sovrumane e il bot è riuscito a farlo in meno di un secondo. Ciò ha battuto il record mondiale di sub-cinque secondi dell’epoca. Due anni dopo, una macchina sviluppata dal MIT risolve un cubo in meno di 0,4 secondi . Alla fine del 2018, un canale YouTube giapponese chiamato Human Controller ha persino sviluppato il proprio cubo di Rubik che si risolve da sé usando un nucleo stampato in 3D collegato a servomotori programmabili.
LE MACCHINE SONO STATE IN GRADO DI RISOLVERE IL CUBO DI RUBIK A VELOCITÀ SOVRUMANE PER ANNI
In altre parole, un robot costruito per un compito specifico e programmato per svolgere quel compito nel modo più efficiente possibile può tipicamente meglio un essere umano, e la risoluzione del cubo di Rubik è qualcosa che il software ha imparato da tempo. Quindi sviluppare un robot per risolvere il cubo, anche umanoide, non è poi così straordinario da solo, e meno alla velocità lenta che opera Dactyl.
Ma il robot Dactyl di OpenAI e il software che lo alimenta sono molto diversi nel design e nello scopo rispetto a una macchina dedicata per la risoluzione dei cubi. Come dice Welinder, il lavoro di robotica in corso di OpenAI non mira a raggiungere risultati superiori in compiti ristretti, in quanto ciò richiede solo lo sviluppo di un robot migliore e la programmazione di conseguenza. Questo può essere fatto senza la moderna intelligenza artificiale.
Invece, Dactyl è sviluppato da zero come una mano robotica autoapprendimento che si avvicina a nuovi compiti proprio come farebbe un essere umano. È addestrato utilizzando un software che cerca, in modo rudimentale al momento, di replicare i milioni di anni di evoluzione che ci aiutano a imparare a usare le mani istintivamente da bambini. Ciò potrebbe un giorno, spera OpenAI, aiutare l’umanità a sviluppare i tipi di robot umanoidi che conosciamo solo dalla fantascienza, robot che possono operare in sicurezza nella società senza metterci in pericolo ed eseguire una vasta gamma di compiti in ambienti caotici come le strade della città e i pavimenti delle fabbriche .
Per imparare a risolvere il cubo di Rubik con una sola mano, OpenAI non ha programmato esplicitamente Dactyl per risolvere il giocattolo; software gratuito su Internet può farlo per te. Ha anche scelto di non programmare singoli movimenti per l’esecuzione della mano, poiché voleva che discernesse quei movimenti da solo. Invece, il team di robotica ha dato al software di base della mano l’obiettivo finale di risolvere un cubo criptato e ha usato l’IA moderna – in particolare un marchio di apprendimento profondo basato su incentivi chiamato rinforzo dell’apprendimento – per aiutarlo lungo il percorso verso la sua comprensione. Lo stesso approccio alla formazione degli agenti di intelligenza artificiale è il modo in cui OpenAI ha sviluppato il suo bot Dota 2 di livello mondiale .
Ma fino a poco tempo fa, è stato molto più facile addestrare un agente di intelligenza artificiale a fare qualcosa virtualmente, ad esempio giocando a un gioco per computer, piuttosto che addestrarlo per svolgere un compito nel mondo reale. Questo perché il software di formazione per fare qualcosa in un mondo virtuale può essere accelerato, in modo che l’IA possa trascorrere l’equivalente di decine di migliaia di anni di formazione in soli mesi di tempo reale, grazie a migliaia di CPU di fascia alta e ultra GPU potenti che lavorano in parallelo.
Fare lo stesso livello di allenamento eseguendo un’attività fisica con un robot fisico non è fattibile. Ecco perché OpenAI sta cercando di sperimentare nuovi metodi di addestramento robotico usando ambienti simulati al posto del mondo reale, qualcosa che l’industria della robotica ha appena sperimentato. In questo modo, il software può esercitarsi ampiamente a un ritmo accelerato su molti computer diversi contemporaneamente, con la speranza che mantenga quella conoscenza quando inizia a controllare un vero robot.
LA MANO ROBOTICA DACTYL DI OPENAI È ALIMENTATA DAL SOFTWARE AI
A causa della limitazione dell’addestramento e di ovvi problemi di sicurezza, i robot utilizzati oggi commercialmente non utilizzano l’IA e sono invece programmati con istruzioni molto specifiche. “Il modo in cui è stato affrontato in passato è l’utilizzo di algoritmi molto specializzati per risolvere compiti, in cui si dispone di un modello accurato sia del robot che dell’ambiente in cui si sta operando”, afferma Welinder. “Per un robot di fabbrica, hai modelli molto precisi e conosci esattamente l’ambiente su cui stai lavorando. Sai esattamente come sarà raccogliere la parte particolare. “
Questo è anche il motivo per cui gli attuali robot sono molto meno versatili degli umani. Richiede una grande quantità di tempo, sforzi e denaro per riprogrammare un robot che assembla, per esempio, una parte specifica di un’automobile o un componente del computer per fare qualcos’altro. Presenta un robot che non è stato adeguatamente addestrato nemmeno con un semplice compito che coinvolge qualsiasi livello di destrezza umana o elaborazione visiva e fallirebbe miseramente. Con le moderne tecniche di intelligenza artificiale, tuttavia, i robot potrebbero essere modellati come umani, in modo che possano usare la stessa comprensione intuitiva del mondo per fare di tutto, dall’apertura delle porte alla frittura di un uovo. Almeno, questo è il sogno.
Siamo ancora a decenni di distanza da quel livello di sofisticazione e i balzi che la comunità dell’IA ha fatto sul lato software – come auto a guida autonoma, traduzione automatica e riconoscimento delle immagini – non si sono tradotti esattamente in robot di prossima generazione. In questo momento, OpenAI sta solo cercando di imitare la complessità di una parte del corpo umano e far funzionare l’analogo robotico in modo più naturale.
Ecco perché Dactyl è una mano robotica a 24 articolazioni modellata su una mano umana, invece delle pinze robotiche a pinza o artiglio che vedi nelle fabbriche. E affinché il software che dà a Dactyl l’apprendimento di come utilizzare tutte quelle articolazioni come farebbe un essere umano, OpenAI ha affrontato migliaia di anni di addestramento alla simulazione prima di provare a risolvere il cubo fisico.
“Se stai addestrando cose sul robot del mondo reale, ovviamente tutto ciò che stai imparando sta lavorando su ciò su cui vuoi effettivamente distribuire il tuo algoritmo. In questo modo, è molto più semplice. Ma oggi gli algoritmi hanno bisogno di molti dati. Per addestrare un robot del mondo reale, per fare qualcosa di complesso, hai bisogno di molti anni di esperienza “, afferma Welinder. “Anche per un essere umano, ci vogliono un paio d’anni e gli umani hanno milioni di anni di evoluzione per avere le capacità di apprendimento per operare una mano.”
In una simulazione, tuttavia, Welinder afferma che l’allenamento può essere accelerato, proprio come con i giochi e altre attività popolari come benchmark AI. “Questo richiede l’ordine di migliaia di anni per addestrare l’algoritmo. Ma ci vogliono solo pochi giorni perché possiamo parallelizzare l’allenamento. Inoltre, non devi preoccuparti che i robot rompano o danneggino qualcuno mentre stai allenando questi algoritmi ”, aggiunge. Tuttavia, in passato i ricercatori hanno riscontrato notevoli problemi nel tentativo di ottenere un addestramento virtuale per lavorare su robot fisici. OpenAI afferma che è tra le prime organizzazioni a vedere davvero progressi in questo senso.
Quando gli fu dato un vero cubo, Dactyl usò il suo addestramento e lo risolse da solo, e lo fece in una varietà di condizioni per le quali non era mai stato esplicitamente addestrato. Ciò include risolvere il cubo con una mano con un guanto, con due dita legate insieme, e mentre i membri OpenAI lo interferiscono continuamente colpendolo con altri oggetti e inondandolo di bolle e pezzi di carta simile a coriandoli.
OPENAI HA ADDESTRATO DACTYL PER MIGLIAIA DI ANNI USANDO LA SIMULAZIONE PRIMA DI TESTARE LE SUE ABILITÀ NEL MONDO REALE
“Abbiamo scoperto che in tutte queste perturbazioni, il robot era ancora in grado di girare con successo il cubo di Rubik. Ma non è passato attraverso questo allenamento ”, afferma Matthias Plappert, leader del team robotico OpenAI di Welinder. “La robustezza che abbiamo riscontrato quando abbiamo provato questo sul robot fisico è stata sorprendente per noi.”
Ecco perché OpenAI considera le nuove competenze acquisite da Dactyl altrettanto importanti sia per il progresso dell’hardware robotico che per la formazione AI. Persino i robot più avanzati al mondo, come i robot umanoidi e simili a quelli dei cani sviluppati dal leader del settore Boston Dynamics , non possono operare in modo autonomo e richiedono un’ampia programmazione specifica per compiti e frequenti interventi umani per svolgere anche azioni di base.
OpenAI afferma che Dactyl è un piccolo ma vitale passo verso il tipo di robot che un giorno potrebbero svolgere lavori manuali o compiti domestici e persino lavorare a fianco degli umani, invece che in ambienti chiusi, senza alcuna programmazione esplicita che governa le loro azioni.
In quella visione per il futuro, la capacità dei robot di apprendere nuovi compiti e adattarsi ai mutevoli ambienti dipenderà tanto dalla flessibilità dell’IA quanto dalla robustezza della macchina fisica. “Questi metodi stanno davvero iniziando a dimostrare che queste sono le soluzioni per gestire tutte le complicazioni intrinseche e la confusione del mondo fisico in cui viviamo”, afferma Plappert.