La startup francese Genesis AI ha presentato una nuova piattaforma robotica composta da una mano umanoide ad alta precisione e da un modello di intelligenza artificiale denominato GENE-26.5, progettato per operare su differenti tipologie di robot senza dipendere da hardware proprietario specifico. L’iniziativa colloca immediatamente Genesis tra le aziende europee più aggressive nel settore emergente della robotica generalista, un mercato in cui convergono intelligenza artificiale multimodale, manipolazione robotica avanzata e sistemi di apprendimento basati sull’imitazione umana.
L’approccio scelto dalla società è di tipo full-stack, cioè orientato al controllo diretto dell’intera catena tecnologica: modelli AI, hardware robotico, raccolta dati, simulatori e sistemi sensoriali vengono sviluppati internamente. Questa strategia nasce dalla convinzione, maturata dal cofondatore Théophile Gervais durante la sua esperienza presso Mistral AI, che i limiti della robotica contemporanea non dipendano esclusivamente dagli algoritmi, ma anche dalla scarsa integrazione tra software e hardware.
Il nuovo modello GENE-26.5 è stato progettato come foundation model robotico multipiattaforma. In pratica, l’obiettivo è creare un sistema AI capace di adattarsi a differenti configurazioni meccaniche e ambienti operativi senza dover essere riscritto per ciascun robot specifico. Questo paradigma rappresenta uno dei principali trend della robotica contemporanea: trasformare i robot da macchine programmate rigidamente per singoli task a sistemi generalisti capaci di apprendere competenze trasferibili.
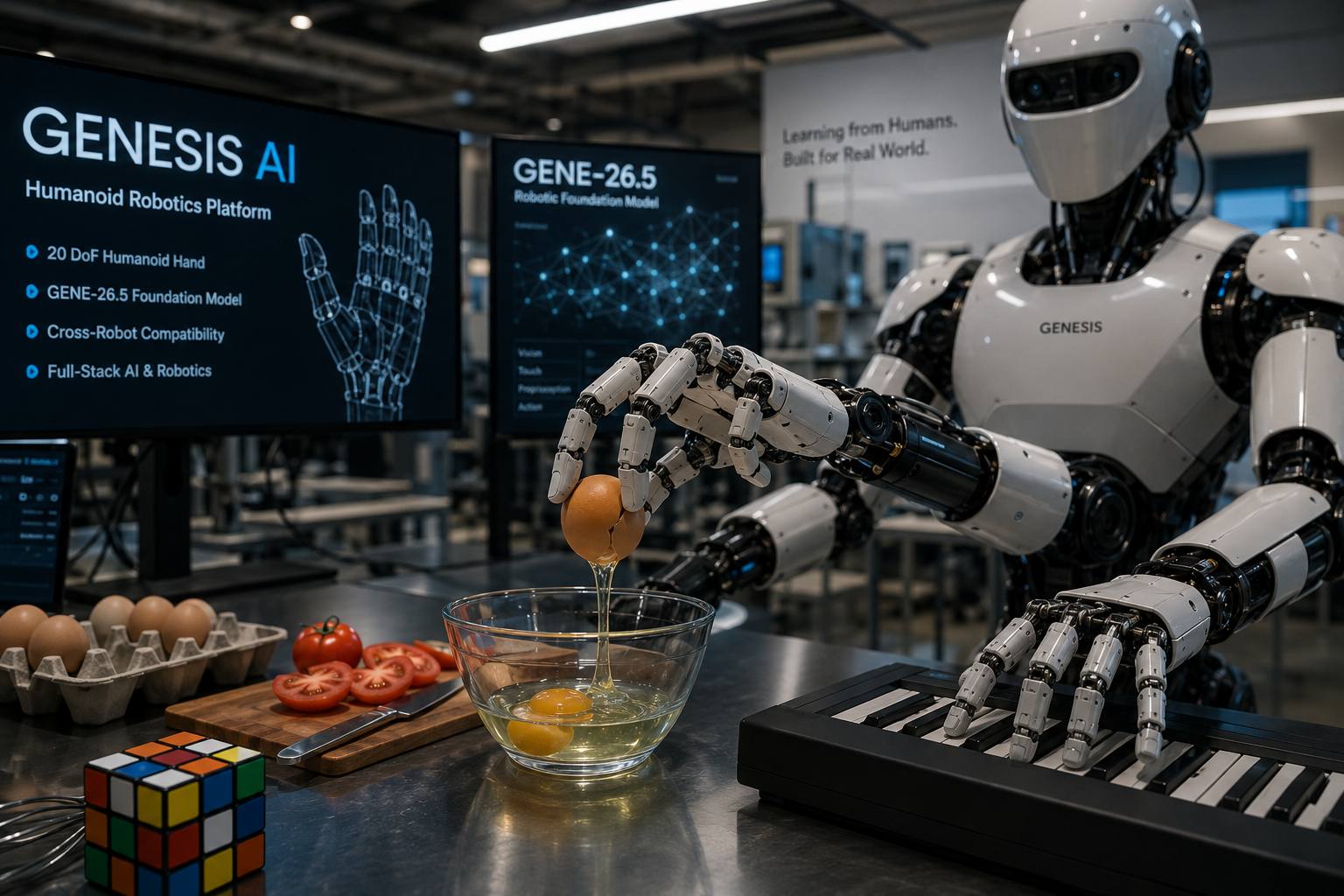
La mano robotica presentata da Genesis costituisce uno degli elementi più avanzati dell’intera architettura. A differenza delle classiche pinze industriali rigide utilizzate nelle linee automatizzate, il dispositivo riproduce dimensioni, articolazioni e struttura biomeccanica della mano umana. La piattaforma utilizza 20 gradi di libertà e 20 motori indipendenti, consentendo movimenti estremamente articolati delle dita e del polso. Questo livello di complessità permette di replicare manipolazioni fini che tradizionalmente rappresentano uno dei problemi più difficili della robotica.
La manipolazione robotica avanzata è molto più complessa della locomozione. Muoversi nello spazio è infatti un problema relativamente strutturato rispetto alla gestione di oggetti deformabili, fragili o variabili. Attività apparentemente banali per un essere umano, come rompere un uovo, affettare un pomodoro o premere tasti di un pianoforte, richiedono in realtà capacità sofisticate di controllo della forza, percezione tattile, coordinazione multi-articolare e adattamento continuo ai microcambiamenti ambientali.
La dimostrazione pubblica realizzata da Genesis evidenzia proprio questo tipo di capacità. La mano robotica è stata mostrata mentre eseguiva operazioni culinarie delicate, risolveva un cubo di Rubik e suonava il pianoforte a 130 battiti al minuto. La componente più significativa della demo riguarda il fatto che il sistema operava autonomamente, senza teleoperazione diretta. Genesis ha inoltre dichiarato che il video mostrava la reale velocità esecutiva del robot, senza accelerazioni artificiali in post-produzione.
Nonostante i risultati, la società ha chiarito che il sistema non ha ancora raggiunto una forma di intelligenza robotica completamente generalista. Attualmente il modello necessita ancora di fasi di addestramento preliminare per task specifici. Questo aspetto è centrale nel panorama robotico moderno: la vera sfida non consiste soltanto nel completare un singolo compito, ma nel trasferire conoscenze motorie e operative tra attività differenti senza riaddestramento massivo.
Secondo il CEO Zhou Xi’an, alcune attività relativamente strutturate, come imparare un brano musicale, possono essere acquisite in circa un’ora di addestramento, mentre task più complessi, come le operazioni culinarie mostrate nella demo, richiedono centinaia di traiettorie di dati. Questo dato mostra chiaramente quanto la raccolta dati rappresenti ancora il principale collo di bottiglia della robotica AI contemporanea.
Per affrontare questo problema, Genesis ha costruito internamente una propria infrastruttura di acquisizione dati basata su guanti sensorizzati. Questi dispositivi registrano movimenti della mano, pressione esercitata, contatti tattili e dinamiche articolari durante le attività umane reali. I guanti sono stati progettati per essere leggeri e compatibili con ambienti industriali, consentendo agli operatori di raccogliere dati durante il normale lavoro quotidiano senza modificare significativamente i propri movimenti naturali.
Questo approccio è particolarmente importante perché la robotica moderna si sta progressivamente spostando dai dataset sintetici ai dati comportamentali umani reali. L’idea centrale è che la mano umana rappresenti il miglior sistema di manipolazione esistente e che i robot debbano imparare direttamente osservando e registrando il comportamento umano piuttosto che attraverso programmazione manuale tradizionale.
Genesis combina inoltre i dati raccolti tramite guanti e telecamere con video pubblici provenienti da internet e ambienti simulativi proprietari. Questa integrazione tra imitation learning, video learning e simulazione rappresenta uno dei principali trend della robotica AI. I simulatori consentono infatti di generare enormi quantità di traiettorie artificiali a costi molto inferiori rispetto alla raccolta fisica reale, accelerando drasticamente il training dei modelli.
L’azienda sostiene che questo metodo permetta di migliorare le prestazioni molto più rapidamente rispetto ai tradizionali sistemi di teleoperazione, nei quali un operatore controlla direttamente il robot da remoto per generare dati di addestramento. La teleoperazione rimane infatti costosa, lenta e difficile da scalare su larga scala.
Genesis punta in particolare ai settori automobilistico, elettronico, farmaceutico e logistico. Si tratta di industrie nelle quali i robot industriali tradizionali mostrano ancora limiti significativi nelle operazioni di precisione e variabilità elevata. Attività come cablaggi, assemblaggi delicati, manipolazione di componenti fragili o operazioni di laboratorio richiedono infatti capacità adattive che le classiche linee robotizzate non riescono ancora a gestire in modo efficiente.