Immagine: Università di Tokyo, GiapponeScienziati dal Giappone hanno creato una pelle umana vivente che aiuterà nella creazione di robot bioibridi, che sono fatti sia di materiali viventi che artificiali.
Il metodo è stato presentato il 9 giugno sulla rivista Matter .
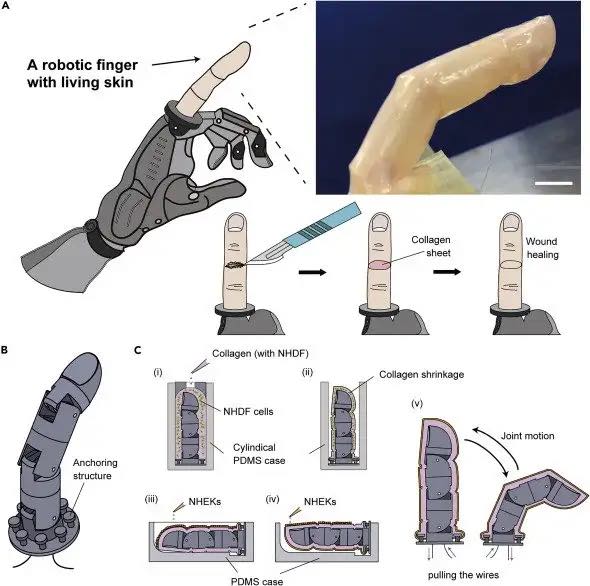
Il team è stato in grado di conferire a un dito robotico una consistenza simile alla pelle, oltre a funzioni idrorepellenti e autorigeneranti.
Shoji Takeuchi è professore all’Università di Tokyo, in Giappone.
“Il dito sembra leggermente ‘sudato’ appena uscito dal mezzo di coltura”, afferma Takeuchi. “Poiché il dito è azionato da un motore elettrico, è anche interessante ascoltare i clic del motore in armonia con un dito che sembra proprio come quello reale.”
Gli scienziati hanno costantemente cercato di far sembrare “reali” i robot umanoidi, specialmente quelli sviluppati per interagire con gli esseri umani nelle industrie sanitarie e dei servizi. Creando un aspetto simile a quello umano, è possibile migliorare l’efficienza della comunicazione e la simpatia della robotica.
Limitazioni della pelle artificiale in silicone
La pelle artificiale sviluppata per i robot attuali è solitamente realizzata in silicone, che imita l’aspetto umano. Tuttavia, non raggiunge trame delicate e realistiche come le rughe e manca di funzioni specifiche per la pelle. C’è stato anche un successo limitato nella fabbricazione di fogli di pelle vivente per coprire i robot. È molto difficile adattarli a oggetti dinamici con superfici irregolari.
“Con quel metodo, devi avere le mani di un abile artigiano in grado di tagliare e personalizzare i fogli di pelle”, continua Takeuchi. “Per coprire in modo efficiente le superfici con le cellule della pelle, abbiamo stabilito un metodo di stampaggio dei tessuti per modellare direttamente il tessuto cutaneo attorno al robot, il che ha portato a una copertura cutanea perfetta su un dito robotico”.
Costruire la pelle viva
Il team ha prima immerso il dito robotico in un cilindro riempito con una soluzione di collagene e fibroblasti dermici umani, che sono due dei componenti principali che compongono i tessuti connettivi della pelle umana. Secondo Takeuchi, il successo del metodo è dovuto alla naturale tendenza al restringimento della miscela di collagene e fibroblasti, che lo fa restringere e conformarsi al dito.
Questo strato fornisce la base per il successivo strato di cellule a cui aderire e queste cellule sono cheratinociti epidermici umani, che costituiscono il 90% dello strato più esterno della pelle. Ciò consente al robot di ottenere una consistenza simile alla pelle e proprietà barriera che trattengono l’umidità.
La pelle ha dimostrato forza ed elasticità sufficienti per consentire al dito robotico di arricciarsi e allungarsi e lo strato più esterno era abbastanza spesso da poter essere sollevato con una pinzetta e respingere l’acqua. Uno degli altri aspetti più interessanti di questo sviluppo è che la pelle artigianale ha dimostrato una capacità di auto-guarigione, proprio come la pelle umana.
“Siamo sorpresi di quanto bene il tessuto cutaneo si adatti alla superficie del robot”, afferma Takeuchi. “Ma questo lavoro è solo il primo passo verso la creazione di robot ricoperti di pelle viva”.
Detto questo, ci sono ancora alcune sfide con questo tipo di pelle vivente. Per uno, è più debole della pelle naturale e richiede un costante apporto di nutrienti e la rimozione dei rifiuti per sopravvivere.
Il team cercherà ora di superare queste sfide incorporando sofisticate strutture funzionali con la pelle, che potrebbero includere follicoli piliferi, unghie, neuroni sensoriali e ghiandole sudoripare.
“Penso che la pelle viva sia la soluzione definitiva per dare ai robot l’aspetto e il tocco delle creature viventi poiché è esattamente lo stesso materiale che copre i corpi degli animali”, afferma Takeuchi.
•Il metodo per generare una copertura senza interruzioni di oggetti 3D con l’equivalente della pelle
•Dito robotico a tre articolazioni ricoperto di equivalente di pelle viva
•Riparazione della ferita di un dito robotico ricoperto di derma equivalente
Progresso e potenziale
I materiali di rivestimento dei robot umanoidi hanno subito trasformazioni da materiali rigidi e pesanti a materiali morbidi e conformi per imitare meglio l’aspetto e la funzione degli esseri umani. Qui, riportiamo un approccio bioibrido per generare robot ricoperti da pelle ingegnerizzata. La copertura della pelle non solo si traduce in un aspetto simile a quello umano, ma consente anche funzioni di autoguarigione. Dimostriamo la copertura senza soluzione di continuità di un dito robotico a tre articolazioni coltivando un singolo pezzo di tessuto cutaneo che circonda il dito robotico. Inoltre, ispirandosi al trattamento medico della pelle profondamente ustionata utilizzando idrogel innestati, dimostriamo la riparazione della ferita di un equivalente del derma che copre un dito robotico coltivando il tessuto ferito innestato con un foglio di collagene. Presi insieme,
Riepilogo
Gli umanoidi sono robot creati con forme o caratteristiche umane; questi robot hanno anche il potenziale per interagire senza problemi con gli esseri umani. Replicando le apparenze e le funzioni (ad esempio, l’autoguarigione) degli esseri umani, gli umanoidi hanno il potenziale per stabilire interazioni uomo-robot più armoniche e naturali. Qui, proponiamo l’uso dell’equivalente della pelle, un modello di pelle vivente costituito da cellule e matrice extracellulare, come materiale di copertura simile all’uomo e autorigenerante per i robot. Abbiamo fabbricato un dito robotico a tre articolazioni ricoperto di pelle equivalente sviluppando un metodo per coprire oggetti tridimensionali con pelle equivalente. Inoltre, ispirandosi al trattamento medico della pelle profondamente ustionata con idrogel innestati, abbiamo dimostrato la riparazione della ferita di un equivalente del derma che copre un dito robotico coltivando il tessuto ferito innestato con un foglio di collagene. Con i risultati di cui sopra, questa ricerca mostra il potenziale dell’utilizzo dell’equivalente della pelle come materiale di copertura simile all’uomo e autorigenerante per i robot.
introduzione
Gli umanoidi sono robot in grado di svolgere un’ampia gamma di compiti per interagire con gli esseri umani in contesti di assistenza medica
situazioni di assistenza infermieristica,
e il settore dei servizi.
Tali compiti per gli umanoidi richiedono un aspetto simile a quello umano per migliorare l’efficienza dello scambio di informazioni con gli umani
ed evocare simpatia.
Per imitare l’aspetto degli umani, lo sviluppo di materiali di copertura umanoidi con tono e consistenza realistici della pelle umana è fondamentale. Inoltre, ci si aspetta che questi materiali di copertura abbiano capacità di autorigenerazione, poiché gli umanoidi coperti da questi materiali sono destinati a operare in ambienti di lavoro incerti e dinamici.
Sebbene la gomma siliconica, che è stata tradizionalmente utilizzata come materiale di copertura per gli umanoidi, abbia acquisito un aspetto simile a quello umano,
manca di molte funzionalità della pelle vivente come la capacità di autoguarigione.
Qui, per la prima volta a nostra conoscenza, proponiamo l’uso dell’equivalente di pelle come materiale di copertura per i robot. Questo materiale vivente non solo conferisce ai robot un aspetto simile a quello umano, ma fornisce anche ai robot capacità di autoguarigione ( Figura 1A). È importante sottolineare che gli equivalenti della pelle sono tessuti in vitro fabbricati utilizzando cellule viventi (fibroblasti, cheratinociti, ecc.) e idrogel della matrice extracellulare (ECM) (collagene, ecc.), che possono imitare caratteristiche uniche della pelle, come l’aspetto e la struttura interna, ottenendo così un tocco morbido e capacità di autoguarigione. Gli equivalenti della pelle sono stati usati come strumenti nella ricerca biologica e come impianti medici per il trattamento di ferite e ustioni gravi.
Alcuni studi hanno anche dimostrato la capacità di autoriparazione in vitro degli equivalenti della pelle dopo che si sono verificate ferite superficiali.
Tuttavia, è stato difficile fabbricare equivalenti della pelle in grado di coprire perfettamente le superfici tridimensionali (3D), curve e irregolari degli umanoidi. Pertinentemente, la maggior parte degli equivalenti della pelle sono stati derivati sotto forma di un foglio piatto bidimensionale a causa dell’incapacità di controllare la forma 3D dell’equivalente del derma, che si restringe e cambia drasticamente la sua forma durante la coltura, e la difficoltà nel seminare uniformemente i cheratinociti su derma equivalente con superfici 3D. Figura 1 Illustrazione concettuale e processo di fabbricazione della “pelle vivente su un robot” proposto in questo documento; vedere anche le figure S1 e S10
In questo studio, abbiamo sviluppato un metodo per costruire una pelle equivalente che copra uniformemente un dito robotico a tre articolazioni come componente fondamentale per le mani degli umanoidi. Questo metodo può essere utilizzato per coprire la superficie 3D di un dito robotico controllando il restringimento dei tessuti attraverso la fissazione dell’ancora. Inoltre, la semina multidirezionale dei cheratinociti ci consente di formare uniformemente lo strato dell’epidermide. Negli esperimenti, abbiamo confermato l’efficacia del nostro metodo di fabbricazione dell’equivalente cutaneo mediante analisi istologiche con colorazione e analisi funzionali con misurazioni elettriche e test di ritenzione idrica. Inoltre, per mostrare la capacità di guarigione della ferita dell’equivalente cutaneo, abbiamo dimostrato che l’equivalente del derma ferito che copre il dito robotico può essere riparato innestando e coltivando un foglio di collagene sul sito della ferita.