Uno scarafaggio con attrezzature di ricerca e soccorso abilitate all’intelligenza artificiale
Ricercatori internazionali di robotica hanno sviluppato un sistema di ricerca e salvataggio urbano (USAR) che utilizza uno scarafaggio vivo “orientabile” per trasportare un sistema di rilevamento dei sopravvissuti a infrarossi abilitato per l’ apprendimento automatico in miniatura attraverso scenari di disastro altrimenti non navigabili.
Il sistema è una collaborazione tra i dipartimenti di ricerca di Singapore, Cina, Germania e Regno Unito. Usa lo scarafaggio del Madagascar come veicolo e ha abbastanza potenza per funzionare per diverse ore.
Il sistema di salvataggio ibrido presenta un modello di apprendimento automatico per il rilevamento umano che è stato addestrato su immagini a infrarossi (IR) e alimenta il sistema di rilevamento IR mobile, che può funzionare autonomamente se necessario, segnalando i sopravvissuti trovati a una stazione operativa di base.
Risorse locali limitate
Il framework di machine learning è richiesto per operare su risorse straordinariamente sottili: solo 191.8kB di RAM statica e 1988kB di memoria Flash sono rimasti per il sistema dai requisiti generali di alimentazione per il dispositivo, che deve anche fornire lo stimolo elettrico per l’insetto.
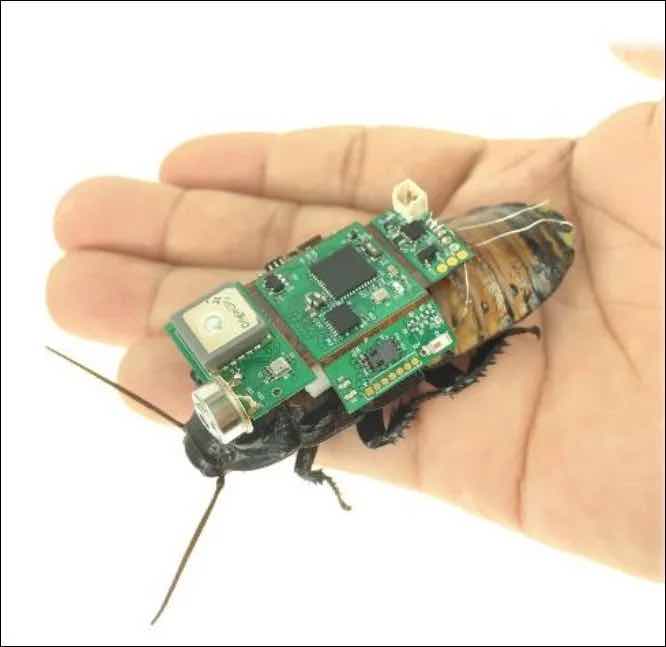
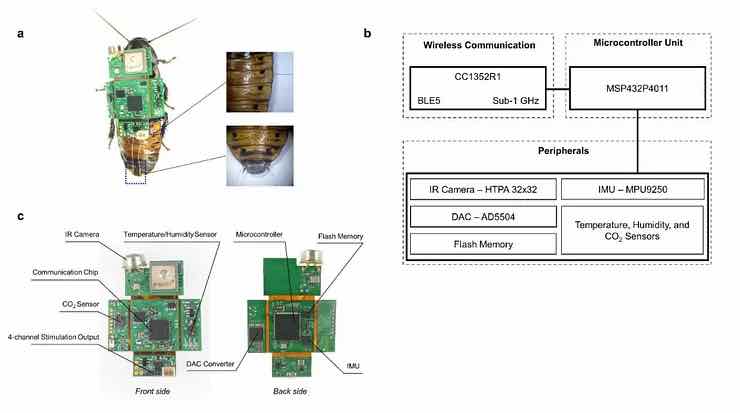
I tre blocchi funzionali dello zaino dello scarafaggio, nella foto sopra, includono la stimolazione wireless, un’unità di controllo primaria e componenti periferici, con il sistema di apprendimento automatico derivato da IR e la funzionalità di navigazione incorporata nell’unità di controllo primaria. Il circuito del rig è stato suddiviso in più componenti per adattarsi meglio alla geometria dello scarafaggio.
La blatta del Madagascar (tra le specie più grandi al mondo, con una capacità di carico massima di 15 g) è controllata da piccole scariche elettriche che lo guidano in una direzione o nell’altra, attuate da quattro elettrodi impiantati nelle antenne della creatura ( cerci ), e in il suo addome. Gli elettrodi sono fissati con cera d’api.
Aggiunta dell’intelligenza artificiale alla ricerca e al salvataggio degli insetti
La nuova iniziativa sviluppa il lavoro precedente della UC Berkeley e della Nanyang Technological University di Singapore, che per prima ha concepito l’ utilizzo di coleotteri orientabili negli scenari USAR.
2016 ricerca sul controllo della traiettoria di volo di un coleottero
Sebbene i coleotteri abbiano la capacità aggiuntiva di volare, la loro capacità di carico viene successivamente ridotta, riducendo le potenziali capacità delle tecnologie di bordo e portando le richieste di consumo energetico a un livello critico, in particolare nel caso in cui sia necessario eseguire un algoritmo di apprendimento automatico.
Il sistema di riconoscimento umano autonomo integrato nella nuova iniziativa utilizza un modello di classificazione delle immagini che utilizza la macchina vettoriale di supporto (SVM) e l’ istogramma dei gradienti orientati .
Il movimento dello scarafaggio è diretto dal sistema di navigazione integrato e guida il “biobot” verso una destinazione predeterminata senza alcuna conoscenza degli ostacoli interposti. Per la maggior parte, le formidabili capacità di navigazione dello scarafaggio risolvono la maggior parte dei problemi nell’arrivare in un luogo altrimenti irraggiungibile.
Il sistema a infrarossi di bordo acquisisce immagini a 1 hz, operando con successo nelle aree scure e segnalando in modalità wireless qualsiasi sopravvissuto localizzato a un centro di comando in tempo reale. Per risparmiare energia, il sistema di analisi delle immagini inizia a funzionare solo se attivato da una lettura a infrarossi positiva.
Il modello occupa solo 18,3 kB di memoria Flash e 52,2 kB di RAM statica, raggiungendo un tempo di calcolo di 95 millisecondi. Un tempo di elaborazione ragionevole è essenziale in uno scenario USAR, poiché le firme a infrarossi distanti potrebbero altrimenti essere perse nell’intervallo di elaborazione poiché lo scarafaggio cambia direzione e attraversa il terreno.
Il sistema dispone inoltre di sensori per monitorare temperatura, umidità e CO2, al fine di segnalare le condizioni locali per un eventuale tentativo di soccorso, e per consentire al centro di controllo di allontanare la creatura da qualsiasi situazione che la metterebbe in pericolo.
Test su terreni simulati
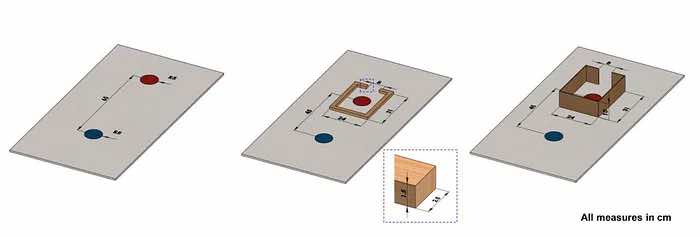
Il sistema è stato testato in uno scenario di disastro simulato (immagine sopra), con un’efficace negoziazione degli ostacoli, tranne in alcune configurazioni particolarmente impegnative che comportano salite vertiginose, poiché lo scarafaggio è in svantaggio di peso a causa dell’attrezzatura collegata.
L’architettura di navigazione inizialmente aveva la tendenza a rimanere bloccata in presenza di ostacoli travolgenti, come situazioni in cui persino lo scarafaggio non poteva procedere oltre, e successivamente i ricercatori hanno sviluppato un sistema di navigazione con feedback predittivo per migliorare le prestazioni di fronte a ostacoli alti. Il sistema è stato in grado di raggiungere una percentuale di successo del 100% in ambienti con ostacoli bassi o nulli e una percentuale di successo più elevata con ostacoli alti.
Laddove si è verificato il fallimento, i ricercatori concludono che ciò potrebbe essere risolto aumentando la durata dell’esperimento, sebbene ciò abbia logicamente implicazioni in uno scenario USAR time-critical.
Vista a infrarossi
La telecamera a infrarossi integrata ha specifiche modeste, operando a 32×32 pixel con un campo visivo di 90 gradi. Le immagini, quando attivate, vengono passate attraverso un filtro di denoising mediano.
Il sistema raggiunge una percentuale di successo dell’87% nel distinguere i soggetti umani da altri tipi di segnatura termica, che sale al 90% quando si trova in un raggio di prossimità di 0,5 me 1,5 m.
A causa dei vincoli energetici e delle dimensioni del chip, lo studio iniziale non presenta un sistema di localizzazione integrato e quindi non è possibile tracciare la posizione dello scarafaggio in tempo reale. I ricercatori suggeriscono che il dead reckoning potrebbe essere implementato come soluzione di risparmio energetico, con segnali di posizione a bassa energia ritrasmessi al centro di controllo, in future implementazioni.
Insetti come operatori di ricerca e soccorso
Gli ultimi dieci anni hanno portato una serie di progetti di ricerca che cercano di utilizzare la resilienza e il potere di navigazione degli insetti per creare sistemi robotici ibridi o puri per scenari di ricerca e salvataggio. Oltre al lavoro relativo allo scarabeo del 2016 che precede quest’ultima iniziativa, ci sono stati numerosi tentativi di ricreare capacità insettoidi in forma puramente robotica.
Questi includono un progetto di ricerca del 2019 dell’UoC che ha offerto un robot ergonomicamente semplice basato sui principi di uno scarafaggio, uno dei primi progetti del suo genere per affrontare l’estrema fragilità degli insetti robotici.