Quando si tratta delle aspettative dei clienti, la pandemia ha cambiato tutto
Scopri come accelerare il servizio clienti, ottimizzare i costi e migliorare il self-service in un mondo incentrato sul digitale.
Un paio di nuovi studi di robotica di Google e dell’Università della California, Berkeley, propongono modi per trovare oggetti occlusi sugli scaffali e risolvere compiti di manipolazione “ricchi di contatto” come lo spostamento di oggetti su un tavolo. La ricerca della UC Berkeley introduce Lateral Access Massima riduzione dell’area di supporto occupazionale (LAX-RAY), un sistema che prevede la posizione di un oggetto target, anche quando solo una parte di quell’oggetto è visibile. Per quanto riguarda il documento coautore di Google, propone Contact-aware Online COntext Inference (COCOI), che mira a incorporare le proprietà dinamiche delle cose fisiche in un framework di facile utilizzo.
Mentre i ricercatori hanno esplorato il problema della robotica della ricerca di oggetti disordinati per un bel po ‘di tempo, ambienti come scaffali, armadi e armadi sono un’area meno studiata, nonostante la loro ampia applicabilità. (Ad esempio, un robot di servizio in una farmacia potrebbe aver bisogno di trovare rifornimenti da un armadietto medico.) I problemi di manipolazione ricchi di contatti sono altrettanto onnipresenti nel mondo fisico e gli esseri umani hanno sviluppato la capacità di manipolare oggetti di varie forme e proprietà in ambienti complessi. Ma i robot lottano con questi compiti a causa delle sfide inerenti alla comprensione della percezione e della fisica ad alta dimensione.
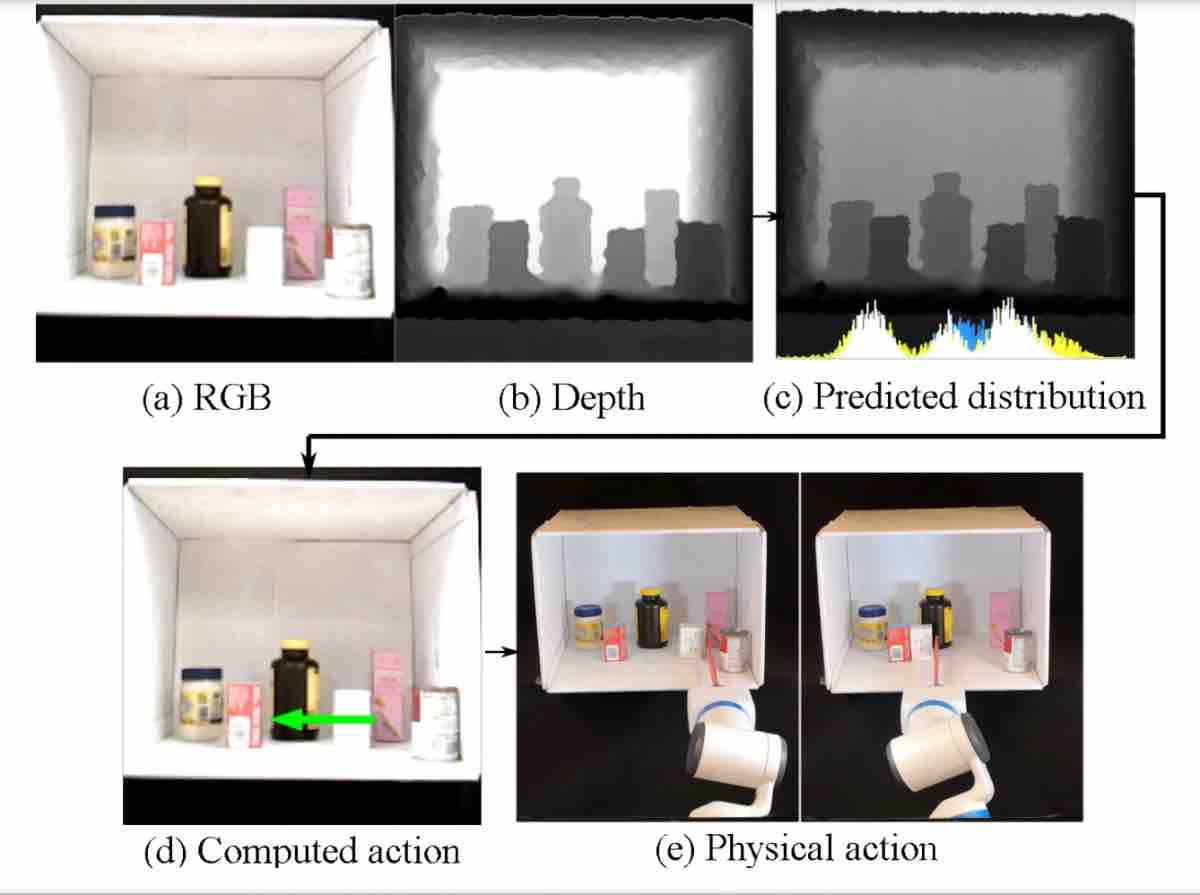
I ricercatori della UC Berkeley, che lavorano presso il dipartimento AUTOLab dell’università, si sono concentrati sulla sfida di trovare oggetti target occlusi in “ambienti ad accesso laterale” o scaffali. Il sistema LAX-RAY comprende tre criteri di ricerca meccanica ad accesso laterale. Chiamati “Uniforme”, “Riduzione dell’area di distribuzione (DAR)” e “Riduzione dell’area di distribuzione su ‘n’ passaggi (DER-n)”, calcolano le azioni per rivelare gli oggetti target occlusi memorizzati sugli scaffali. Per testare le prestazioni di queste politiche, i coautori hanno sfruttato un framework aperto – The First Order Shelf Simulator (FOSS) – per generare 800 ambienti di scaffale casuali di varia difficoltà. Quindi hanno distribuito LAX-RAY su uno scaffale fisico con un robot Fetch e una telecamera di rilevamento della profondità incorporata,
Robotica IA
I ricercatori affermano che le politiche DAR e DER-n hanno mostrato prestazioni elevate rispetto alla politica Uniform. In una simulazione, LAX-RAY ha raggiunto un’accuratezza dell’87,3%, che si è tradotta in un’accuratezza di circa l’80% quando applicato al robot del mondo reale. Nel lavoro futuro, i ricercatori intendono studiare modelli di profondità più sofisticati e l’uso di spinte parallele alla telecamera per creare spazio per le spinte laterali. Sperano anche di progettare azioni di trazione utilizzando ventose attivate pneumaticamente per sollevare e rimuovere gli oggetti occludenti dagli scaffali affollati.
Nel lavoro di Google, che ha avuto il contributo dei ricercatori di Alphabet’s X, Stanford e UC Berkeley, i coautori hanno progettato un metodo di apprendimento per rinforzo profondo che prende dati multimodali e utilizza una “struttura rappresentativa profonda” per catturare dinamiche ricche di contatti. COCOI attinge riprese video e letture da un sensore tattile montato su robot per codificare le informazioni dinamiche in una rappresentazione. Ciò consente a un algoritmo di apprendimento per rinforzo di pianificare con “consapevolezza dinamica” che migliora la sua robustezza in ambienti difficili.
I ricercatori hanno analizzato COCOI facendo in modo che un robot simulato e reale spinga gli oggetti in posizioni target evitando di farli cadere. Non è così facile come sembra; le informazioni chiave non potevano essere facilmente estratte dalle prospettive del terzo angolo e le proprietà dinamiche del compito non erano direttamente osservabili dalle informazioni grezze del sensore. Inoltre, la politica doveva essere efficace per oggetti con diversi aspetti, forme, masse e proprietà di attrito.
Robotica IA
I ricercatori affermano che COCOI ha superato una linea di base “in un’ampia gamma di impostazioni” e proprietà dinamiche. Alla fine, intendono estendere il loro approccio alla spinta di oggetti non rigidi, come pezzi di stoffa.