I “robot stupidi” compiono compiti sfruttando le caratteristiche fisiche
Affinché sciami di robot possano agire collettivamente, i ricercatori devono coreografare le loro interazioni facendo affidamento su algoritmi e componenti avanzati. Tuttavia, se i robot sono semplici con una mancanza di programmazione avanzata, raramente è possibile ottenere un comportamento coordinato.
Dana Randall, ADVANCE Professor of Computing e Daniel Goldman, Dunn Family Professor, hanno guidato un team di ricercatori del Georgia Institute of Technology per affrontare questo problema. Il team si è proposto di dimostrare come semplici robot possano ancora svolgere compiti che vanno oltre le capacità di uno.
La ricerca è stata pubblicata sulla rivista Science Advances il 23 aprile.
I robot stupidi svolgono compiti complessi
Definiti “robot stupidi”, il team ha utilizzato quelle che erano fondamentalmente particelle granulari mobili, e questi sono ciò che si proponeva di dimostrare di poter svolgere compiti complessi. I ricercatori hanno riferito di essere stati in grado di rimuovere tutti i sensori, le comunicazioni, la memoria e il calcolo dai robot e hanno sfruttato le caratteristiche fisiche dei robot per completare una serie di attività. Secondo il team, questo tratto è chiamato “incarnazione del compito”.
I BOBbots, che sta per “robot che si comportano, organizzano, ronzano”, prendono il nome da Bob Behringer, un pioniere della fisica granulare.
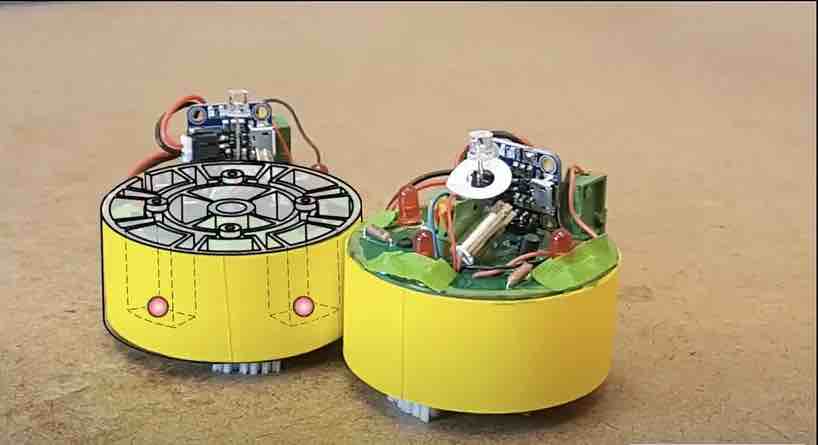
I robot sono “tanto stupidi quanto diventano”, dice Randall. “Il loro telaio cilindrico ha spazzole vibranti sotto e magneti sciolti sulla loro periferia, che fanno trascorrere più tempo in luoghi con più vicini”.
Robot semplici, algoritmi intelligenti: ecco i BOBbot
Simulazioni al computer
Insieme alla piattaforma sperimentale, il team si è anche affidato a precise simulazioni al computer guidate da Shengkai Li, uno studente di fisica della Georgia Tech. Queste simulazioni hanno aiutato a studiare vari aspetti del sistema che non potevano essere esaminati in laboratorio.
I BOBbot sono estremamente semplici, ma i ricercatori hanno comunque dimostrato che quando i robot si muovono insieme e si scontrano l’uno con l’altro, “si formano aggregati compatti in grado di rimuovere collettivamente detriti troppo pesanti per essere spostati da soli”, spiega Goldman. “Mentre la maggior parte delle persone costruisce robot sempre più complessi e costosi per garantire il coordinamento, volevamo vedere quali attività complesse potevano essere eseguite con robot molto semplici”.
Il lavoro del team è stato ispirato da un modello teorico di particelle che si muovono su una scacchiera e, per studiare un modello matematico dei BOBbot, è stata sviluppata un’astrazione teorica chiamata sistema di particelle auto-organizzanti. Attingendo alla teoria della probabilità, alla fisica statistica e agli algoritmi stocastici, il team è stato in grado di dimostrare che all’aumentare delle interazioni magnetiche, il modello teorico subisce un cambiamento di fase. Passa rapidamente da disperso ad aggregante, formando grappoli compatti simili a sistemi come acqua e ghiaccio.
Randall è anche professore di informatica e professore a contratto di matematica presso la Georgia Tech.
“L’analisi rigorosa non solo ci ha mostrato come costruire i BOBbot, ma ha anche rivelato una robustezza intrinseca del nostro algoritmo che ha consentito ad alcuni robot di essere difettosi o imprevedibili”, afferma Randall.