RLWRLD ha lanciato All Hands Up, una piattaforma aperta dedicata al confronto tecnico tra mani robotiche antropomorfe e multiarticolate. Il progetto raccoglie dati su oltre dieci modelli e punta a offrire a sviluppatori, ricercatori e aziende uno strumento per valutare non soltanto le specifiche dichiarate dai produttori, ma anche i compromessi meccanici che incidono sulle prestazioni nelle attività di manipolazione.
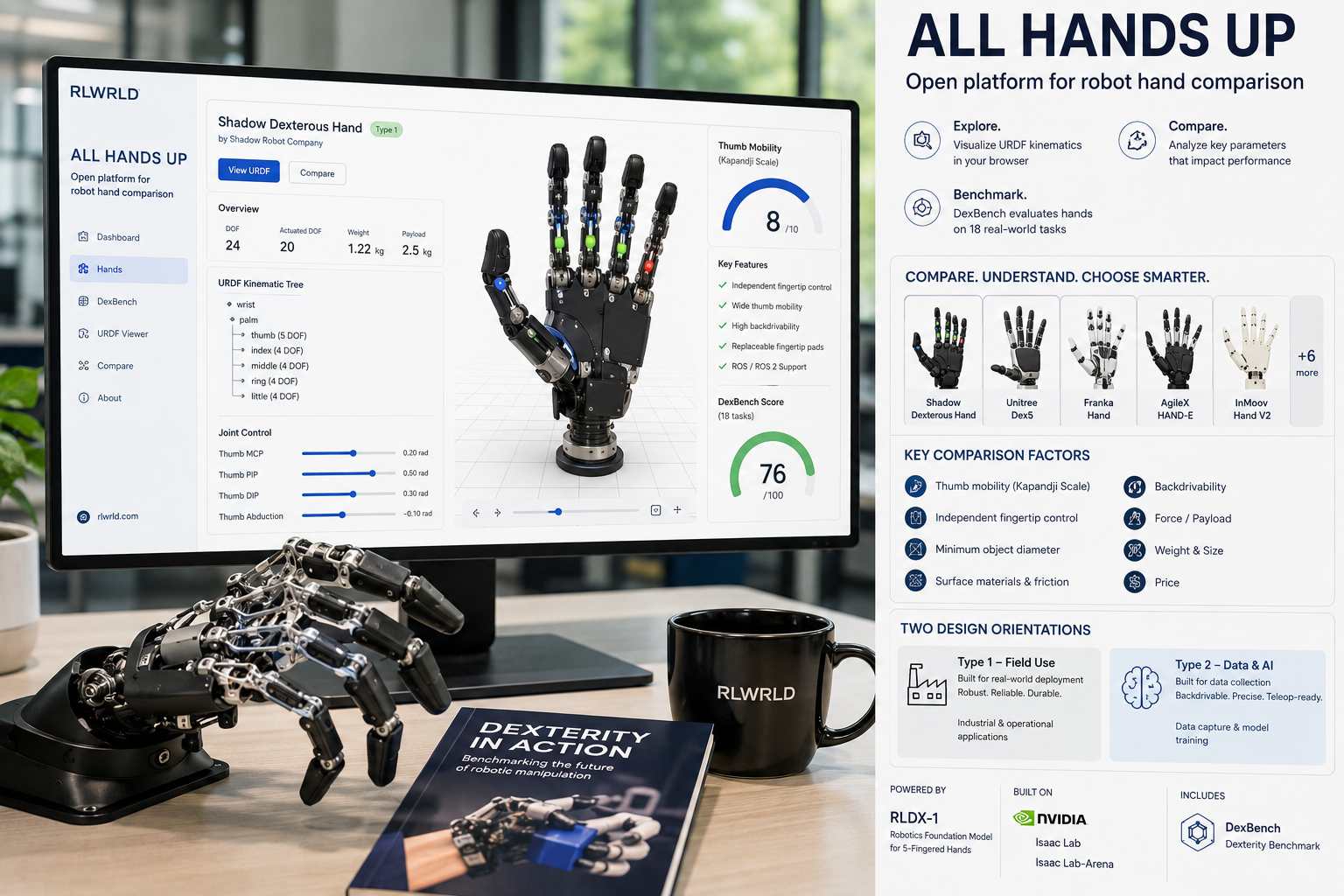
La piattaforma utilizza file URDF, acronimo di Unified Robot Description Format, per visualizzare in un browser la struttura cinematica delle mani. L’utente può muovere i singoli giunti con il mouse, osservare gradi di libertà, articolazioni, configurazione delle dita e possibili forme di presa senza installare software di simulazione. I dati URDF possono inoltre essere riutilizzati in ambienti di sviluppo e simulazione robotica, dove descrivono link, joint, geometrie, masse e limiti di movimento del dispositivo.
All Hands Up organizza le caratteristiche delle mani robotiche in parametri che incidono direttamente sulla manipolazione. Tra questi rientrano la mobilità del pollice, valutata anche attraverso la Kapandji Scale, la possibilità di comandare in modo indipendente le articolazioni terminali delle dita, il diametro minimo degli oggetti afferrabili e il comportamento dei materiali esterni rispetto all’attrito. Questi elementi definiscono se una mano riesce a eseguire prese fini, afferrare oggetti sottili, ruotare componenti, adattarsi a superfici diverse o sostenere oggetti senza dover aumentare eccessivamente la forza di serraggio.
Il progetto parte da un limite noto della robotica umanoide: non esiste una mano che massimizzi contemporaneamente destrezza, robustezza, forza, peso, costo, facilità di controllo e retroazionabilità. Una mano molto compatta può avere una struttura più semplice e una maggiore resistenza meccanica, ma offrire movimenti meno indipendenti. Un sistema progettato per applicare elevate forze di presa può risultare meno adatto al controllo delicato. Una mano con alta backdrivability, cioè con attuatori e trasmissioni che possono essere mossi dall’esterno con minore resistenza, può essere utile per teleoperazione, raccolta dati e apprendimento per imitazione, ma richiede compromessi diversi rispetto a una soluzione industriale pensata per operare in modo ripetitivo e robusto.
Per rendere confrontabili queste differenze RLWRLD integra DexBench, il proprio benchmark per la destrezza. Il sistema valuta le mani su 18 compiti di manipolazione reale e collega le caratteristiche costruttive ai risultati operativi. L’obiettivo è mostrare dove una mano risulta più adatta, per esempio nel prendere oggetti, nel ruotarli, nello spostarli tra le dita o nel mantenere una presa stabile, e dove invece emergono limiti legati alla geometria, agli attuatori, al controllo delle articolazioni o ai materiali di contatto.
All Hands Up distingue anche due orientamenti progettuali. Le mani di tipo 1 sono pensate soprattutto per l’impiego sul campo, quindi per applicazioni industriali e operative dove contano durata, robustezza, peso e affidabilità. Le mani di tipo 2 sono orientate alla raccolta di dati e all’addestramento dei modelli, con maggiore attenzione alla precisione, alla capacità di essere mosse e controllate dall’esterno e alla qualità delle sequenze ottenute tramite teleoperazione o dimostrazioni umane.
La piattaforma deriva dall’esperienza maturata da RLWRLD nello sviluppo di RLDX-1, il proprio Robotics Foundation Model per mani robotiche a cinque dita. L’azienda ha inoltre indicato DexBench come uno dei tre elementi della collaborazione con NVIDIA per definire standard condivisi nella manipolazione robotica, insieme a formati dati per l’addestramento e integrazione con i framework NVIDIA Isaac Lab e Isaac Lab-Arena.
All Hands Up viene quindi proposto come archivio tecnico e strumento di valutazione per il settore della physical AI. La funzione principale non è attribuire un punteggio assoluto alle mani robotiche, ma rendere visibili le relazioni tra cinematica, attuazione, materiali, capacità di presa e risultati nelle attività reali, così da aiutare chi deve scegliere hardware, raccogliere dati o progettare modelli destinati alla manipolazione fine.