Gli scienziati informatici sviluppano un sistema di navigazione accurato per i robot del pronto soccorso
Un nuovo sistema di navigazione per robot che si è dimostrato più accurato è stato sviluppato da informatici presso l’Università della California a San Diego. Il sistema consentirà ai robot di navigare meglio nei reparti di emergenza e negli ambienti clinici affollati. Insieme al nuovo sistema, i ricercatori hanno anche sviluppato un set di dati di video open source che possono essere utilizzati per addestrare futuri sistemi di navigazione robotica.
La ricerca è stata presentata in un documento per la Conferenza internazionale sulla robotica e l’automazione, che si terrà a Xi’an, in Cina, dal 30 maggio al 5 giugno. Il team era guidato dalla professoressa Laurel Riek e dalla dottoranda Angelique Taylor.
I medici hanno parlato a lungo di come i robot potrebbero aiutare medici, infermieri e personale del pronto soccorso, e una delle conclusioni è stata che potevano farlo meglio consegnando forniture e materiali. Perché ciò avvenga, i robot dovrebbero essere in grado di evitare situazioni che coinvolgono medici impegnati che si trovano con pazienti in condizioni critiche o gravi.
Riek tiene appuntamenti in informatica e medicina d’urgenza all’UC San Diego.
“Per eseguire queste attività, i robot devono comprendere il contesto di ambienti ospedalieri complessi e le persone che vi lavorano”, ha affermato Riek.
Safety Critical Deep Q-Network (SafeDQN)
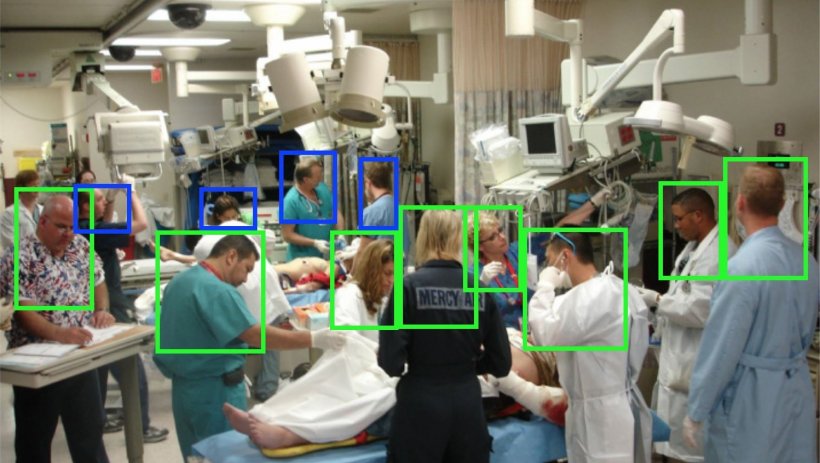
Il sistema di navigazione costruito da Taylor e colleghi si chiama Safety Critical Deep Q-Network (SafeDQN). È stato costruito attorno a un algoritmo che guarda quante persone sono ammassate insieme in uno spazio e quanto si stanno muovendo bruscamente.
L’algoritmo si basa sulle osservazioni dei medici nel pronto soccorso, ad esempio, quando un intero team fornisce aiuto a un paziente che ha una condizione in peggioramento. I medici si spostano in un contesto di emergenza in modo molto preciso e veloce, quindi il sistema di navigazione consente ai robot di spostarsi intorno a questi gruppi di persone evitando di intralciarsi.
Taylor fa parte dell’Healthcare Robotics Lab di Riek presso il Dipartimento di informatica e ingegneria della UC San Diego.
“Il nostro sistema è stato progettato per affrontare gli scenari peggiori che possono verificarsi nell’ED”, ha detto Taylor
L’algoritmo è stato addestrato da video su Youtube provenienti da documentari e reality show sui pronto soccorso. Sono disponibili oltre 700 video per altri team di ricerca che desiderano addestrare algoritmi e robot.
L’algoritmo è stato testato in un ambiente simulato e, se confrontato con altri sistemi di navigazione all’avanguardia per robot, il sistema SafeDQN era più efficiente e sicuro in tutti i casi.
I ricercatori ora testeranno il sistema su un robot fisico in un ambiente di vita reale e affermano che ha applicazioni al di fuori del dipartimento di emergenza, come le missioni di ricerca e soccorso.