Il nuotatore dotato di intelligenza artificiale è in grado di passare da un’andatura locomotiva all’altra in modo adattivo per navigare da solo verso qualsiasi posizione target
I ricercatori della Santa Clara University, del New Jersey Institute of Technology e dell’Università di Hong Kong sono stati in grado di insegnare con successo ai microrobot come nuotare tramite l’apprendimento per rinforzo profondo, segnando un salto sostanziale nella progressione della capacità di micronuoto.
C’è stato un enorme interesse nello sviluppo di micronuotatori artificiali in grado di navigare nel mondo in modo simile ai microrganismi natatori naturali, come i batteri. Tali micronuotatori promettono per una vasta gamma di future applicazioni biomediche, come la somministrazione mirata di farmaci e la microchirurgia. Tuttavia, la maggior parte dei micronuotatori artificiali fino ad oggi può eseguire solo manovre relativamente semplici con andature locomotorie fisse.
Nello studio dei ricercatori pubblicato su Communications Physics , hanno ragionato che i micronuotatori potrebbero imparare – e adattarsi a condizioni mutevoli – attraverso l’IA. Proprio come gli esseri umani che imparano a nuotare richiedono apprendimento per rinforzo e feedback per rimanere a galla e spingersi in varie direzioni in condizioni mutevoli, così anche i micronuotatori, sebbene con la loro serie unica di sfide imposte dalla fisica nel mondo microscopico.
“Essere in grado di nuotare da solo su microscala è un compito impegnativo”, ha affermato On Shun Pak, professore associato di ingegneria meccanica presso la Santa Clara University. “Quando vuoi che un micronuotatore esegua manovre più sofisticate, il design delle sue andature locomotorie può diventare rapidamente intrattabile”.
Combinando le reti neurali artificiali con l’apprendimento per rinforzo, il team ha insegnato con successo a un semplice micronuotatore a nuotare e navigare verso qualsiasi direzione arbitraria. Quando il nuotatore si muove in un certo modo, riceve un feedback su quanto sia buona la particolare azione. Il nuotatore poi impara progressivamente a nuotare in base alle sue esperienze interagendo con l’ambiente circostante.
“Simile a un essere umano che impara a nuotare, il micronuotatore impara a muovere le sue ‘parti del corpo’ – in questo caso tre microparticelle e collegamenti estensibili – per auto-promuoversi e girare”, ha affermato Alan Tsang, assistente professore di ingegneria meccanica presso il Università di Hong Kong. “Lo fa senza fare affidamento sulla conoscenza umana ma solo su un algoritmo di apprendimento automatico.”
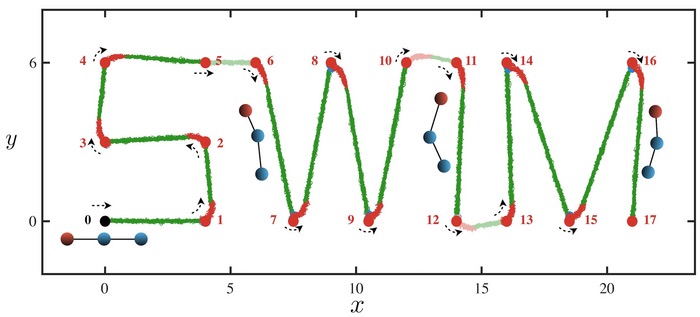
Il nuotatore dotato di intelligenza artificiale è in grado di passare da un’andatura locomotiva all’altra in modo adattivo per navigare da solo verso qualsiasi posizione target.
A dimostrazione della potente abilità del nuotatore, i ricercatori hanno dimostrato che potrebbe seguire un percorso complesso senza essere programmato in modo esplicito. Hanno anche dimostrato le solide prestazioni del nuotatore nella navigazione sotto le perturbazioni derivanti dai flussi di liquidi esterni.
“Questo è il nostro primo passo nell’affrontare la sfida dello sviluppo di micronuotatori in grado di adattarsi come cellule biologiche nella navigazione autonoma in ambienti complessi”, ha affermato Yuan-nan Young, professore di scienze matematiche presso il New Jersey Institute of Technology.
Tali comportamenti adattivi sono cruciali per le future applicazioni biomediche di micronuotatori artificiali in mezzi complessi con fattori ambientali incontrollati e imprevedibili.
“Questo lavoro è un esempio chiave di come il rapido sviluppo dell’intelligenza artificiale possa essere sfruttato per affrontare le sfide irrisolte nei problemi di locomozione nella dinamica dei fluidi”, ha affermato Arnold Mathijssen, esperto di microrobot e biofisica presso l’Università della Pennsylvania, che non è stato coinvolto nella ricerca “L’integrazione tra apprendimento automatico e micronuotatori in questo lavoro stimolerà ulteriori connessioni tra queste due aree di ricerca altamente attive”.