Il nuovo modello esplora il movimento ad alta velocità nei ghepardi, avvicinandoci ai robot con le gambe
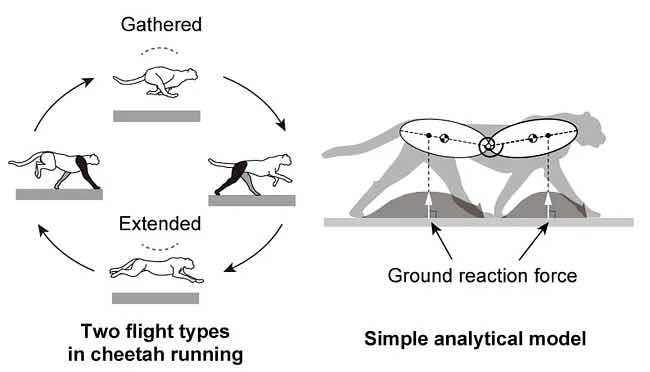
I ghepardi sono i mammiferi terrestri più veloci, ma non sappiamo ancora esattamente perché. Abbiamo informazioni su come, come l’uso di un’andatura “galoppo” alle loro velocità più elevate, e hanno due diversi tipi di “volo”. Il primo coinvolge gli arti anteriori e gli arti posteriori sotto il corpo e si chiama “volo raccolto”, mentre l’altro coinvolge gli arti anteriori e gli arti posteriori distesi e si chiama “volo esteso”.
Il volo prolungato è responsabile di consentire ai ghepardi di raggiungere alte velocità, ma esattamente quanto velocemente dipende dalle forze di terra e dalle condizioni specifiche. I ghepardi dimostrano anche un notevole movimento della colonna vertebrale durante il volo mentre si alternano tra flessione e allungamento in modalità raccolte ed estese, e questo consente la locomozione ad alta velocità. Nonostante tutta questa conoscenza, non capiamo ancora molto delle dinamiche responsabili di queste abilità.
Il Dr. Tomoya Kamimura del Nagoya Institute of Technology, Giappone, è specializzato in meccanica intelligente e locomozione.
“Tutti gli animali che corrono costituiscono una fase di volo e una fase di appoggio, con diverse dinamiche che regolano ogni fase”, spiega il dott. Kamimura.
La fase di volo prevede che tutti i piedi siano in aria e il centro di massa di tutto il corpo esibisca un movimento balistico. Durante la fase statica, le forze di reazione al suolo vengono assorbite dal corpo attraverso i piedi.
“A causa di dinamiche così complesse e ibride, le osservazioni possono solo portarci così lontano nel svelare i meccanismi alla base delle dinamiche di corsa degli animali”, continua il dott. Kamimura.
La modellazione al computer porta intuizioni
Per ottenere una migliore comprensione della prospettiva dinamica dell’andatura dell’animale e del movimento della colonna vertebrale durante la corsa, i ricercatori si sono affidati alla modellazione al computer con modelli semplici, che ha avuto un enorme successo.
Detto questo, devono ancora esserci molti studi che esplorino i tipi di volo e il movimento della colonna vertebrale che si verificano durante il galoppo, quindi il team di ricerca ha intrapreso uno studio pubblicato su Scientific Reports , basandosi su un semplice modello che emula il movimento verticale e della colonna vertebrale.
Lo studio del team ha coinvolto un modello bidimensionale comprendente due corpi rigidi e due barre senza massa, che rappresentavano le zampe del ghepardo. I corpi erano collegati da un giunto, che replicava il movimento di flessione della colonna vertebrale, e da una molla di torsione. Il team ha anche assegnato ruoli dinamici identici alle zampe anteriori e posteriori.
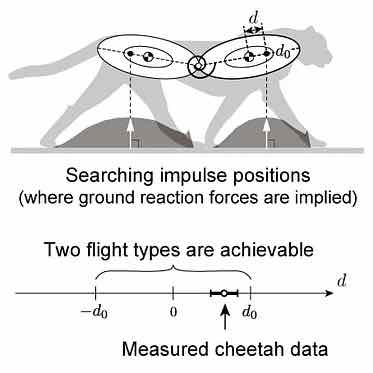
Il team ha risolto le equazioni del moto semplificate che governavano il modello, che hanno portato a sei possibili soluzioni periodiche, due delle quali assomigliavano a due diversi tipi di volo, come un ghepardo al galoppo, e quattro assomigliavano a un solo tipo di volo, a differenza dei ghepardi. Questi si basavano sui criteri relativi alle forze di reazione al suolo, forniti dalle soluzioni.
I criteri sono stati quindi verificati con dati misurati sui ghepardi e il team ha scoperto che il ghepardo al galoppo nel mondo reale soddisfaceva il criterio per due tipi di volo attraverso la flessione della colonna vertebrale.
Tutto ciò ha portato i ricercatori a ottenere nuove informazioni sulla velocità dei ghepardi. Le soluzioni periodiche hanno anche rivelato che il galoppo del cavallo comporta un volo raccolto a causa del movimento limitato della colonna vertebrale, il che significa che le velocità estremamente elevate raggiunte dai ghepardi sono il risultato di un volo prolungato e della flessione della colonna vertebrale.
“Anche se il meccanismo alla base di questa differenza nei tipi di volo tra le specie animali rimane ancora poco chiaro, i nostri risultati estendono la comprensione dei meccanismi dinamici alla base della locomozione ad alta velocità nei ghepardi. Inoltre, possono essere applicati in futuro alla progettazione meccanica e di controllo di robot con gambe”, afferma il dott. Kamimura.