I ricercatori sviluppano un metodo per stabilizzare le dita robotiche durante l’intervento chirurgico
I ricercatori della Texas A&M University hanno sviluppato una nuova tecnologia chirurgica per stabilizzare le braccia robotiche durante l’intervento chirurgico. Il nuovo studio è stato pubblicato sulla rivista Scientific Reports.
Dita robotiche come estensione del chirurgo
Il team di ricercatori ha dimostrato che gli utenti possono avere una percezione accurata della distanza da contattare attraverso l’uso di correnti elettriche che vengono inviate alle impronte digitali. Le correnti elettriche provocano piccoli ronzii percettibili e gli utenti sono in grado di controllare le dita robotiche in modo più preciso e accurato quando operano su superfici fragili.
Secondo i ricercatori, il metodo potrebbe essere utilizzato dai chirurghi per ridurre le lesioni involontarie, alcune delle quali si verificano durante le procedure operative assistite da robot.
Hangye Park è un assistente professore presso il Dipartimento di Ingegneria Elettrica e Informatica.
“Una delle sfide con le dita robotiche è garantire che possano essere controllati con precisione sufficiente per atterrare delicatamente sul tessuto biologico”, ha affermato Park. “Con il nostro design, i chirurghi saranno in grado di avere un’idea intuitiva di quanto siano lontane le loro dita robotiche dal contatto, informazioni che possono quindi utilizzare per toccare strutture fragili con la giusta quantità di forza.”
I chirurghi utilizzano sistemi chirurgici assistiti da robot o sistemi chirurgici telerobotici, come estensioni fisiche di se stessi. I chirurghi controllano quindi le dita robotiche con movimenti propri, il che consente di eseguire procedure complicate da remoto. Ciò consente inoltre ai chirurghi di assumere più pazienti per cure mediche e, a causa delle dimensioni ridotte delle dita robotiche, è possibile eseguire incisioni più piccole. Con la tecnologia, i chirurghi non sono tenuti a praticare grandi incisioni, che sono spesso necessarie per accogliere le mani del chirurgo nel corpo del paziente.
Uno degli aspetti chiave dello spostamento preciso delle dita robotiche è l’uso dello streaming live di informazioni visive, che provengono da telecamere posizionate su bracci telerobotici. Ciò richiede che i chirurghi osservino i monitor per abbinare i movimenti delle dita ai movimenti delle dita telerobotiche. Questo li aiuta a localizzare dove sono le dita robotiche e quanto sono vicine l’una all’altra.
Secondo Park, le informazioni visive da sole non sono sufficienti per guidare i movimenti delle dita, il che è estremamente importante quando le dita operano molto vicino al cervello e ad altri tessuti delicati.
“I chirurghi possono solo sapere quanto distanti tra loro le dita effettive sono indirettamente l’una dall’altra, cioè osservando dove le loro dita robotiche sono l’una rispetto all’altra su un monitor”, ha detto Park. “Questa visione rotonda diminuisce il loro senso di quanto siano distanti tra loro le dita reali, il che influenza il modo in cui controllano le loro dita robotiche.”
Guanto dotato di sonde di stimolazione
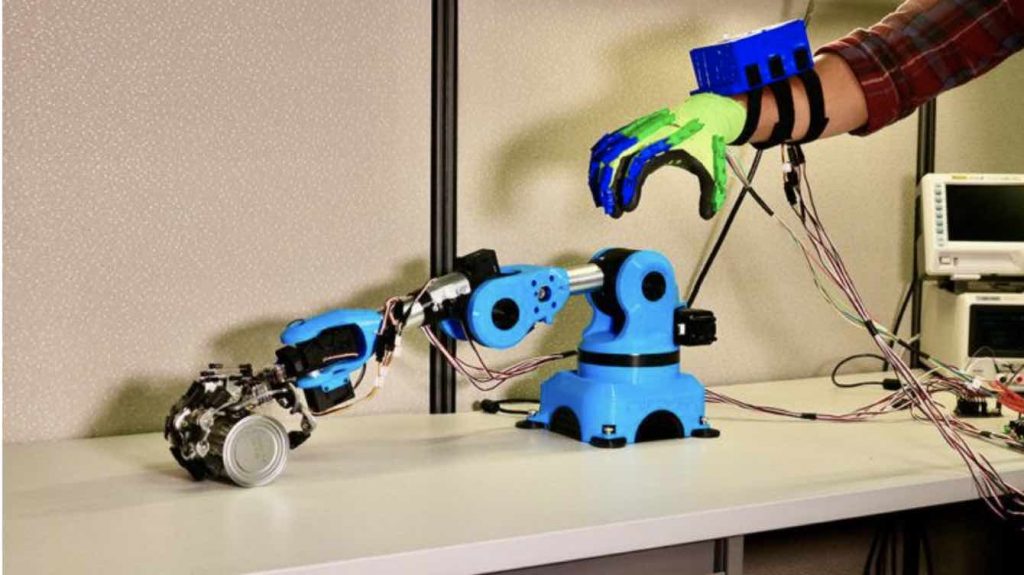
Nel tentativo di superare questa sfida, il team di ricercatori ha sviluppato un modo alternativo per fornire informazioni a distanza ed è indipendente dal feedback visivo. Lo fanno usando guanti dotati di sonde di stimolazione, che passano diverse punte di corrente elettrica sulla punta delle dita. In questo modo, gli utenti potevano essere addestrati ad associare la frequenza degli impulsi di corrente alla distanza, in modo tale che vi sia un aumento delle frequenze correnti quando un oggetto di prova si avvicina.
La tecnologia era specifica per la sensibilità dell’utente alle frequenze di corrente elettrica. Ciò significa che nel caso in cui un utente sia sensibile a una gamma più ampia di frequenze correnti, le informazioni sulla distanza sono state quindi fornite con un aumento minore delle correnti.
Secondo i ricercatori, gli utenti che ricevono impulsi elettrici erano in grado di ridurre la loro forza di contatto di circa il 70% e avevano una consapevolezza aumentata della vicinanza alle superfici sottostanti. Una delle osservazioni conclusive è stata che l’informazione di prossimità fornita attraverso lievi impulsi elettrici era circa tre volte più efficace della semplice informazione visiva.
Secondo Park, i nuovi sviluppi potrebbero aumentare drasticamente la manovrabilità durante l’intervento chirurgico, riducendo al contempo i danni ai tessuti non intenzionali.
“Il nostro obiettivo era quello di trovare una soluzione che potesse migliorare l’accuratezza nella stima di prossimità senza aumentare l’onere del pensiero attivo necessario per questo compito”, ha detto. “Quando la nostra tecnica è pronta per l’uso in contesti chirurgici, i medici saranno in grado di sapere intuitivamente quanto sono distanti le dita robotiche dalle strutture sottostanti, il che significa che possono mantenere la loro attenzione attiva sull’ottimizzazione dell’esito chirurgico dei loro pazienti.”