I ricercatori sviluppano microrobot estremamente abili
I ricercatori della Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) e dell’Harvard Wyss Institute for Biologically Inspired Engineering hanno sviluppato un microrobot estremamente abile. HAMR-JR è una versione a mezza scala del microscopico Harvard Ambulator Microrobot (HAMR) ispirato in precedenza.
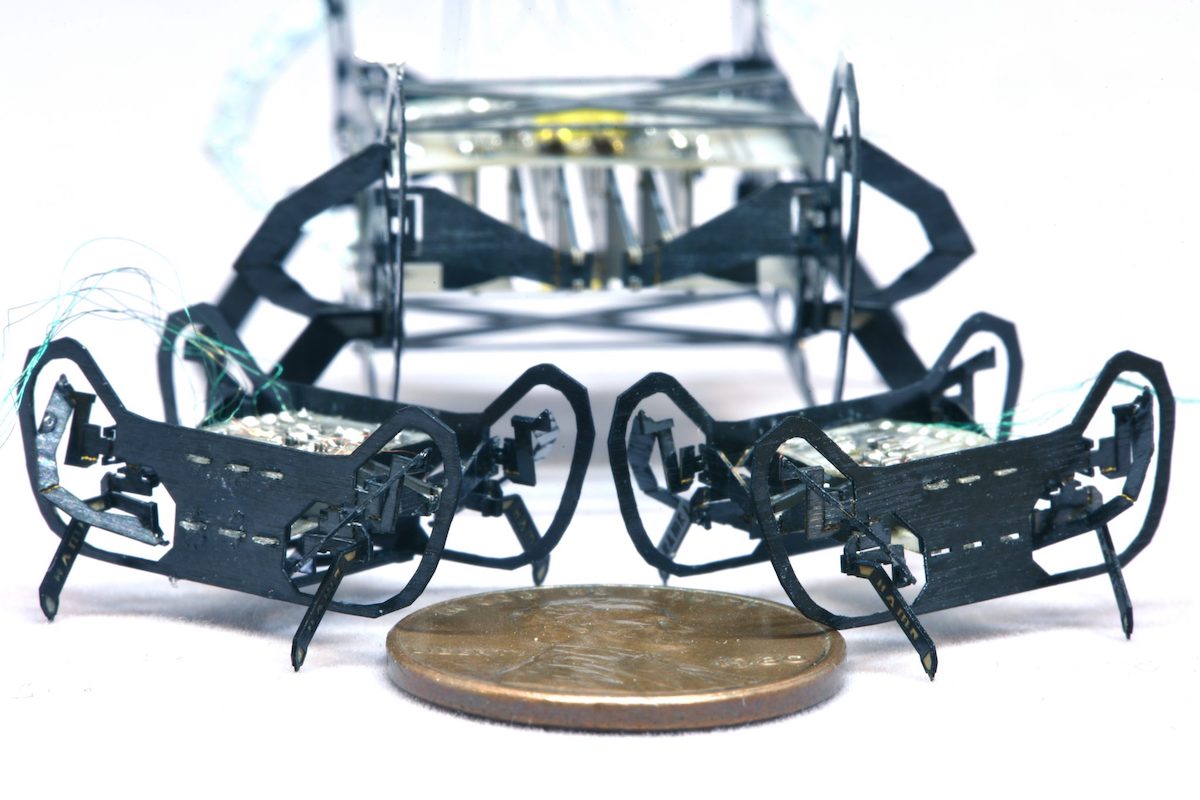
L’HAMR-JR ha le dimensioni di un centesimo, ma è in grado di eseguire tutti i compiti dell’HAMR più grande. È uno dei microbot più abili da creare.
La ricerca intitolata ” Ridimensionamento di un microrobot delle dimensioni di un insetto, HAMR-VI in HAMR-Jr ” è stata presentata virtualmente alla Conferenza internazionale sulla robotica e l’automazione (ICRA 2020).
Kaushik Jayaram è un ex borsista post-dottorato presso SEAS e Wyss, nonché il primo autore dell’articolo. Jayaram è anche professore assistente presso l’Università del Colorado, Boulder.
“La maggior parte dei robot su questa scala sono piuttosto semplici e dimostrano solo la mobilità di base”, ha dichiarato Jayaram. “Abbiamo dimostrato che non è necessario compromettere la destrezza o il controllo delle dimensioni. “
Uno dei compiti del progetto era capire se il processo di produzione pop-up, utilizzato per costruire versioni precedenti di HAMR e microbot come il RoboBee, potesse essere usato per costruire robot su più scale. Potrebbe essere piccolo come un robot chirurgico o grande quanto un robot industriale.
PC-MEMS
Il processo utilizzato per costruire HAMR-JR è chiamato sistemi microelettromeccanici a circuito stampato o PC-MEMS. In questo processo, i componenti del robot vengono inseriti in una struttura 3D dopo essere stati incisi su un foglio 2D. Per HAMR-JR, la progettazione di fogli 2D di robot, attuatori e circuiti di bordo è stata ridotta per creare un robot più piccolo con le stesse funzionalità.
“La parte meravigliosa di questo esercizio è che non abbiamo dovuto cambiare nulla del design precedente”, ha detto Jayaram. “Abbiamo dimostrato che questo processo può essere applicato praticamente a qualsiasi dispositivo in una varietà di dimensioni.”
Ridimensionamento HAMR-JR
HAMR-JR ha solo 2,25 centimetri di lunghezza corporea con un peso di 0,3 grammi. Oltre ad essere uno dei più piccoli microrobot, è anche uno dei più veloci, in grado di spostare 14 lunghezze del corpo al secondo.
Principi come la lunghezza del passo e la rigidità articolare vengono influenzati quando il robot viene ridimensionato. Per ovviare a questo, i ricercatori hanno anche sviluppato un modello in grado di prevedere le metriche di locomozione come velocità di corsa, forze del piede e carico utile in base alle dimensioni del bersaglio. Con questo modello, è possibile sviluppare un sistema con le giuste specifiche.
Robert Wood è coautore del documento e professore di ingegneria e scienze applicate Charles River in SEAS. È anche membro del Core Faculty del Wyss.
“Questo nuovo robot dimostra che abbiamo una buona conoscenza degli aspetti teorici e pratici del ridimensionamento di robot complessi utilizzando il nostro approccio di assemblaggio pieghevole”, ha affermato Wood.
La ricerca è stata sostenuta da DARPA e dal Wyss Institute.
Altri coautori includono Jennifer Shum, Samantha Castellanos ed E. Farrell Helbling.