Il robot azionato da joystick potrebbe aiutare i chirurghi a trattare l’ictus a distanza
Il sistema potrebbe fornire un trattamento endovascolare teleoperato ai pazienti durante la finestra di tempo critica dopo l’inizio di un ictus.
Gli ingegneri del MIT hanno sviluppato un sistema telerobotico per aiutare i chirurghi a curare rapidamente e a distanza i pazienti che soffrono di ictus o aneurisma. Con un joystick modificato, i chirurghi in un ospedale possono controllare un braccio robotico in un altro luogo per operare in sicurezza su un paziente durante una finestra di tempo critica che potrebbe salvare la vita del paziente e preservare la sua funzione cerebrale.
Il sistema robotico, il cui movimento è controllato tramite magneti, è progettato per assistere a distanza nell’intervento endovascolare, una procedura eseguita in situazioni di emergenza per trattare gli ictus causati da un coagulo di sangue. Tali interventi normalmente richiedono che un chirurgo guidi manualmente un filo sottile fino al coagulo, dove può eliminare fisicamente il blocco o somministrare farmaci per romperlo.
Una limitazione di tali procedure è l’accessibilità: i chirurghi neurovascolari hanno spesso sede presso le principali istituzioni mediche che sono difficili da raggiungere per i pazienti in aree remote, in particolare durante l'”ora d’oro” — il periodo critico dopo l’inizio di un ictus, durante il quale deve essere somministrato il trattamento per ridurre al minimo qualsiasi danno al cervello.
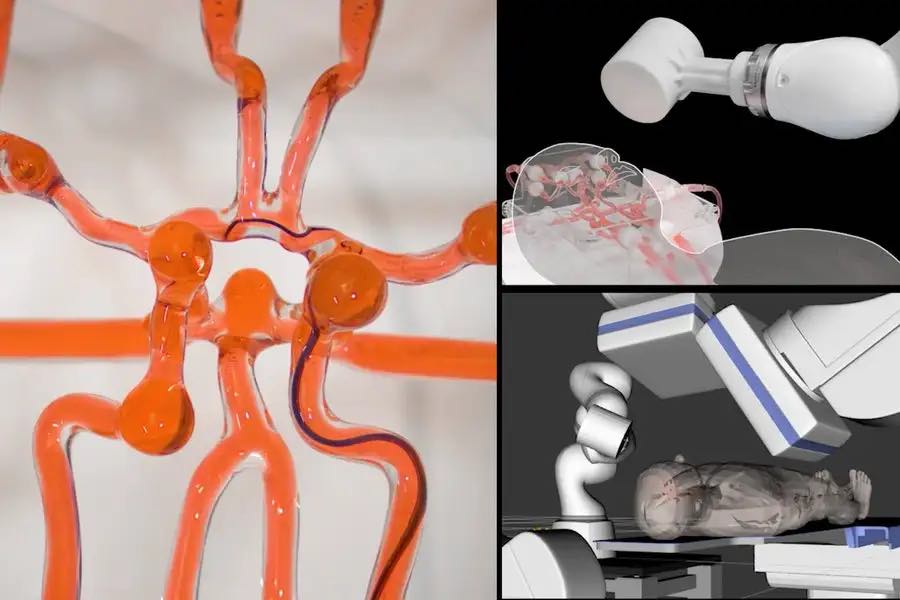
Il team del MIT prevede che il suo sistema robotico possa essere installato in ospedali più piccoli e guidato a distanza da chirurghi qualificati nei centri medici più grandi. Il sistema include un braccio robotico di livello medico con un magnete attaccato al polso. Con un joystick e immagini dal vivo, un operatore può regolare l’orientamento del magnete e manipolare il braccio per guidare un filo magnetico sottile e morbido attraverso arterie e vasi.
I ricercatori hanno dimostrato il sistema in un “fantasma”, un modello trasparente con vasi che replicano le complesse arterie del cervello. Con solo un’ora di formazione, i neurochirurghi sono stati in grado di controllare a distanza il braccio del robot per guidare un filo attraverso un labirinto di navi per raggiungere le posizioni target nel modello.
“Immaginiamo che, invece di trasportare un paziente da una zona rurale a una grande città, potrebbe andare in un ospedale locale dove gli infermieri potrebbero installare questo sistema. Un neurochirurgo in un importante centro medico potrebbe guardare l’imaging dal vivo del paziente e utilizzare il robot per operare in quell’ora d’oro. Questo è il nostro sogno per il futuro”, afferma Xuanhe Zhao, professore di ingegneria meccanica e di ingegneria civile e ambientale al MIT.
Zhao e il suo team hanno pubblicato oggi le loro scoperte su Science Robotics . I coautori del MIT includono l’autore principale Yoonho Kim, Emily Genevriere e Jaehun Choe, insieme a Pablo Harker, Robert Regenhardt, Justin Vranic, Adam Dmytriw e Aman Patel al Massachusetts General Hospital (MGH) e Marcin Balicki di Philips Research North America .
La chirurgia endovascolare è una procedura specializzata e minimamente invasiva che prevede l’attenta torsione e la guida di un sottile filo medico attraverso le arterie e i vasi del corpo fino a una posizione target, in modo da evitare di danneggiare le pareti dei vasi. La procedura richiede in genere anni di formazione per essere padroneggiata da un chirurgo.
I sistemi robotici vengono esplorati come tecnologie assistive nella chirurgia endovascolare. Questi sistemi coinvolgono principalmente azionamenti motori che fanno avanzare e ritraggono un filo mentre lo attorcigliano attraverso il sistema vascolare del corpo.
“Ma avere una svolta robotica con lo stesso livello di sofisticatezza [come un chirurgo] è impegnativo”, osserva Kim. “Il nostro sistema si basa su un meccanismo fondamentalmente diverso”.
Il nuovo sistema del team si basa sul lavoro del 2019 , in cui hanno dimostrato di guidare un filo controllato magneticamente attraverso un modello in silicone a grandezza naturale dei vasi sanguigni del cervello. Lo hanno fatto in quel momento usando un magnete portatile, delle dimensioni di una lattina di zuppa, che hanno manipolato manualmente.
Da allora hanno fissato il magnete all’estremità di un braccio robotico per uso medico, che può essere guidato utilizzando una piccola manopola del joystick su un mouse. Inclinando il joystick, i ricercatori possono inclinare il magnete in un orientamento che può seguire un filo magnetico. I pulsanti del mouse controllano una serie di azionamenti lineari motorizzati, che avanzano e ritraggono il filo per farlo muovere avanti e indietro.
Il filo è sottile e flessibile come un filo guida neurovascolare convenzionale, con una punta morbida e magneticamente reattiva che segue e si piega nella direzione di un campo magnetico.
Trovare un percorso
Il team ha testato il sistema robotico nel Catheter Lab di MGH, una sala operatoria con apparecchiature di imaging medico standard utilizzate nelle procedure endovascolari. I ricercatori hanno installato il braccio robotico in laboratorio, insieme a un modello di vasi sanguigni in silicone a grandezza naturale. Hanno impostato il joystick, insieme a un monitor che mostra un video dal vivo del modello, in una sala di controllo. Da lì, un operatore ha guardato il video mentre utilizzava il joystick per guidare a distanza il cavo attraverso le navi.
Il team ha addestrato un gruppo di neurochirurghi a utilizzare il sistema robotico. Dopo solo un’ora di formazione, ogni chirurgo è stato in grado di utilizzare con successo il sistema per guidare il filo attraverso vasi complessi che sono difficili da navigare con un filo guida manuale.
Il team ha anche utilizzato il sistema robotico per eliminare i coaguli simulati in aree difficili da raggiungere nel modello. Hanno guidato il filo guida attraverso i vasi, e dietro angoli acuti e curve, per raggiungere le regioni in cui i ricercatori hanno simulato i coaguli. Una volta guidato il filo al coagulo, i chirurghi hanno proceduto con metodi endovascolari standard per infilare un microcatetere lungo il filo fino al sito del coagulo. Hanno ritirato il filo, lasciando il catetere, che hanno poi applicato per rimuovere con successo il coagulo.
“Lo scopo principale del filo guida magnetico è raggiungere la posizione target in modo rapido e sicuro, in modo che i dispositivi standard come i microcateteri possano essere utilizzati per fornire terapie”, afferma Kim. “Il nostro sistema è come un esploratore.”
Spera che il sistema teleoperato possa aiutare più pazienti a ricevere cure urgenti. Vede anche vantaggi per i chirurghi, che in genere eseguono tali procedure vascolari nella stessa stanza del paziente, pur essendo esposti alle radiazioni dell’imaging a raggi X.
“I neurochirurghi possono utilizzare il robot in un’altra stanza o anche in un’altra città senza esposizione ripetuta ai raggi X”, afferma Zhao. “Siamo davvero entusiasti del potenziale impatto di questa tecnologia sulla salute globale, dato che l’ictus è una delle principali cause di morte e disabilità a lungo termine”.
Questa ricerca è stata supportata in parte dalla National Science Foundation, dal National Institutes of Health e dalla Phillips Research of North America.