Il sistema RoboGrammar automatizza e ottimizza la progettazione dei robot
La forma di un robot determina i tipi di attività che può eseguire e l’ambiente in cui può operare. Con gli attuali limiti tecnologici, non c’è modo di costruire e testare ogni modulo, ma un nuovo sistema sviluppato dai ricercatori del MIT consente queste molte forme da simulare. Dopo le simulazioni, i migliori possono essere selezionati dal gruppo.
Il nuovo sistema si chiama RoboGrammar e il primo passo è informarlo sui tipi di parti del robot disponibili, come ruote e giunti. Quindi indichi il tipo di terreno su cui opererà il robot, ma fondamentalmente è così. RoboGrammar genera quindi una struttura e un programma di controllo ottimizzati.
Avanzando nel campo del design robotico
Il nuovo sistema è un grande passo avanti in un campo avanzato che è ancora prevalentemente manuale.
Allan Zhao è l’autore principale della ricerca e uno studente di dottorato presso il MIT Computer Science and Artificial Intelligence Laboratory (CSAIL).
“La progettazione dei robot è ancora un processo molto manuale”, afferma Zhao. Il sistema RoboGrammar è “un modo per inventare nuovi progetti di robot più creativi che potrebbero essere potenzialmente più efficaci”.
La ricerca sarà presentata questo mese alla conferenza SIGGRAPH Asia.
Secondo Zhao, i robot sono costruiti per tutti i tipi di attività, ma “tendono tutti ad essere molto simili nella loro forma e design generale. Quando pensi di costruire un robot che deve attraversare vari terreni, salti immediatamente su un quadrupede. Ci chiedevamo se questo fosse davvero il design ottimale. “
Il team credeva che un design nuovo e più innovativo potesse produrre risultati migliori e migliorare la funzionalità, motivo per cui hanno costruito un modello di computer per le attività. Il sistema non è stato influenzato dalla convenzione precedente e sono state applicate alcune regole.
Zhao scrive che la raccolta di possibili forme di robot è “composta principalmente da disegni privi di senso. Se riesci a collegare le parti in modo arbitrario, ti ritroverai con un guazzabuglio “.
RoboGrammar: Grammatica grafica per la progettazione di robot ottimizzata per il terreno
Guarda questo video su YouTube
La grammatica grafica
Il team ha deciso di sviluppare una “grammatica grafica”, che limita il modo in cui possono essere disposti i componenti del robot. Questo è solo così che ogni progetto generato dal computer funziona a un livello di base, con vincoli come non essere in grado di collegare i segmenti delle gambe tra loro invece delle articolazioni.
Zhao è stato ispirato dagli animali, in particolare dagli artropodi, durante la progettazione delle regole della grammatica dei grafi.
Gli artropodi sono “caratterizzati dall’avere un corpo centrale con un numero variabile di segmenti. Alcuni segmenti possono avere le gambe attaccate “, dice Zhao. “E abbiamo notato che è sufficiente per descrivere non solo gli artropodi ma anche forme più familiari”.
Utilizzando la grammatica grafica, RoboGrammar opera in tre fasi. Innanzitutto, definisce il problema. In secondo luogo, progetta possibili soluzioni robotiche. Terzo, seleziona quelli ottimali.
Gli utenti umani sono responsabili della definizione del problema e dell’inserimento del set di componenti robotici disponibili, come motori, gambe e segmenti di collegamento. L’utente inserisce anche il tipo di terreno su cui opererà il robot.
“Questa è la chiave per assicurarsi che i robot finali possano essere effettivamente costruiti nel mondo reale”, afferma Zhao.
Centinaia di migliaia di strutture
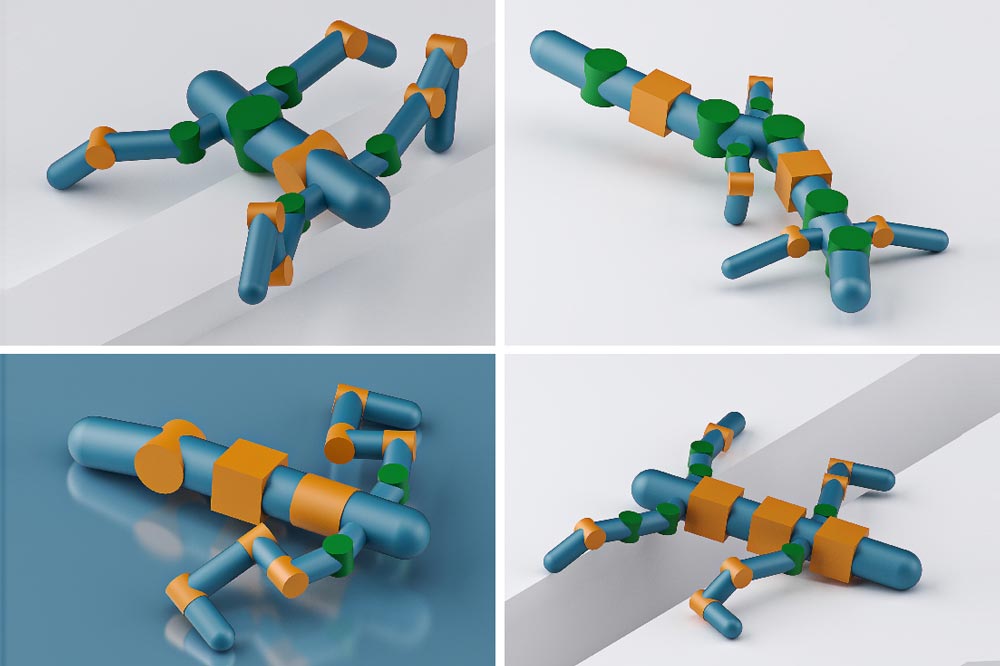
RoboGrammar prende le regole grammaticali dei grafici e progetta centinaia di migliaia di possibili strutture robotiche, con vari aspetti differenti.
“È stato piuttosto stimolante per noi vedere la varietà di design”, dice Zhao. “Mostra decisamente l’espressività della grammatica.”
Tuttavia, non tutti i progetti sono buoni e scegliere il migliore significa che i movimenti e le funzioni di ogni robot devono essere valutati.
“Fino ad ora, questi robot sono solo strutture”, dice Zhao.
Il team ha sviluppato un controller per ogni robot attraverso un algoritmo chiamato Model Predictive Control, che dà la priorità al movimento rapido in avanti, e questo è ciò che fa avanzare le strutture.
“La forma e il controller del robot sono profondamente intrecciati, motivo per cui dobbiamo ottimizzare individualmente un controller per ogni robot”, afferma Zhao.
I ricercatori utilizzano quindi un algoritmo di rete neurale per trovare robot ad alte prestazioni. L’algoritmo campiona e valuta diversi set di robot e apprende quali progetti funzionano per quali attività.
Tutto ciò che è stato menzionato fino a questo punto avviene senza intervento umano.
“Questo lavoro è il coronamento dei 25 anni di ricerca per progettare automaticamente la morfologia e il controllo dei robot”, afferma Hod Lipson, ingegnere meccanico e informatico presso la Columbia University. Non è stato coinvolto nella ricerca. “L’idea di usare le grammatiche di forma esiste da un po ‘, ma da nessuna parte questa idea è stata eseguita così bene come in questo lavoro. Una volta che siamo in grado di convincere le macchine a progettare, realizzare e programmare robot automaticamente, tutte le scommesse sono annullate. “
Secondo Zhao, RoboGrammar è “uno strumento per i progettisti di robot per espandere lo spazio delle strutture robotiche su cui attingono”.
Il team ora intende costruire e testare alcuni dei robot nel mondo reale e Zhao afferma che il sistema potrebbe spostarsi oltre l’attraversamento del terreno e in aree come i mondi virtuali.
“Diciamo che in un videogioco volevi generare molti tipi di robot, senza avere un artista per crearli. RoboGrammar funzionerebbe per questo quasi immediatamente “, dice Zhao.