I ricercatori dell’Harvard John A. Paulson School of Engineering and Applied Sciences hanno sviluppato un nuovo approccio per l’assistenza robotica. Aiuta a superare una grande sfida nella progettazione di robotica indossabile che può essere utilizzata per aiutare a camminare in condizioni reali.
Le odierne piattaforme di assistenza robotica indossabile personalizzabili richiedono molta regolazione manuale o automatica per assistere le persone, il che può essere difficile per i pazienti.
Il nuovo approccio si basa sull’assistenza robotica dell’esosuit calibrata su un individuo e si adatta a varie attività di camminata del mondo reale in pochi secondi. Il sistema di ispirazione biologica utilizza misurazioni a ultrasuoni della dinamica muscolare, che ne consentono la personalizzazione e l’attività specifica per gli utenti.
Robert D. Howe è un professore di ingegneria di Abbott e James Lawrence e coautore del documento, che è stato pubblicato su Science Robotics .
“Il nostro approccio basato sui muscoli consente una generazione relativamente rapida di profili di assistenza individualizzati che forniscono un reale beneficio alla persona che cammina”, ha affermato Howe.
Sistemi di ispirazione biologica precedente vs. nuovo approccio
I precedenti sistemi di ispirazione biologica si sono concentrati sui movimenti dinamici degli arti e di chi li indossa, ma i ricercatori hanno guardato al di fuori di questo.
Richard Nuckols è un Postdoctoral Research Associate presso SEAS e co-primo autore dell’articolo.
“Abbiamo utilizzato gli ultrasuoni per guardare sotto la pelle e misurato direttamente ciò che i muscoli dell’utente stavano facendo durante diverse attività di deambulazione”, ha affermato Nuckols. “I nostri muscoli e tendini hanno compliance, il che significa che non c’è necessariamente una mappatura diretta tra il movimento degli arti e quello dei muscoli sottostanti che guidano il loro movimento”.
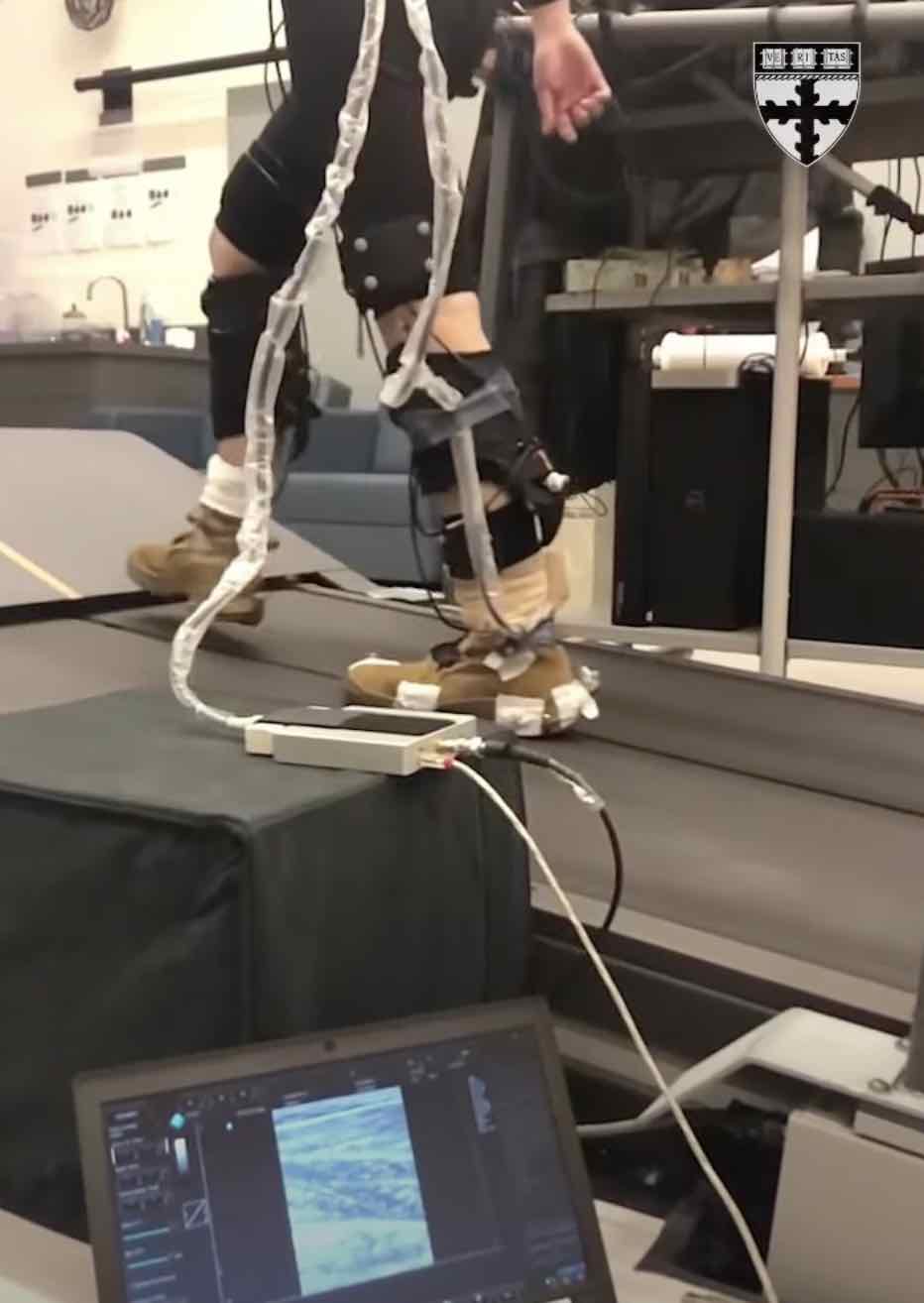
Il team di ricerca ha collegato un sistema a ultrasuoni portatile ai polpacci dei partecipanti prima di eseguire l’imaging dei muscoli mentre eseguivano diverse attività di deambulazione.
Krithika Swaminathan è uno studente laureato presso SEAS e la Graduate School of Arts and Sciences (GSAS) e co-primo autore dello studio.
“Da queste immagini preregistrate, abbiamo stimato la forza assistiva da applicare in parallelo con i muscoli del polpaccio per compensare il lavoro aggiuntivo che devono svolgere durante la fase di spinta del ciclo di deambulazione”, ha affermato Swaminathan.
Catturare il profilo del muscolo
Il sistema richiede solo pochi secondi di camminata per catturare il profilo del muscolo e, per ciascuno dei profili, i ricercatori hanno misurato quanta energia metabolica la persona ha usato durante la camminata con e senza l’esotuta.
Il team ha scoperto che l’energia metabolica del camminare su una gamma di velocità e inclinazioni è stata ridotta in modo significativo con l’assistenza basata sui muscoli. Hanno anche scoperto che era necessaria una forza di assistenza inferiore per ottenere lo stesso o migliore beneficio energetico metabolico rispetto agli studi precedenti.
Sangjun Lee è uno studente laureato presso SEAS e GSAS e co-primo autore dello studio.
“Misurando direttamente il muscolo, possiamo lavorare in modo più intuitivo con la persona che utilizza l’esotuta”, ha affermato Lee. “Con questo approccio, l’exosuit non sta sopraffacendo chi lo indossa, sta lavorando in modo cooperativo con loro.”
In situazioni del mondo reale, l’exosuit ha dimostrato la capacità di adattarsi rapidamente ai cambiamenti nella velocità e nell’inclinazione del cammino. Il team ora cercherà di testare il sistema con aggiustamenti in tempo reale.
“Questo approccio può aiutare a supportare l’adozione della robotica indossabile in situazioni dinamiche del mondo reale, consentendo un’assistenza confortevole, su misura e adattiva”, ha affermato Walsh.