Il programma di apprendimento automatico si collega al cervello umano e comanda i robot
I ricercatori dell’Ecole Polytechnique Fédérale ddi Losanna hanno sviluppato un programma di apprendimento automatico che può essere collegato a un cervello umano e utilizzato per comandare un robot. Il programma può alterare i movimenti del robot in base a segnali elettrici dal cervello.
Questi nuovi progressi potrebbero aiutare i pazienti tetraplegici che non sono in grado di parlare o eseguire movimenti. Si basa sul grande lavoro svolto in passato per sviluppare sistemi che aiutino questi pazienti a completare le attività da soli.
Lo studio è stato pubblicato su Communications Biology .
La prof.ssa Aude Billard è a capo del Laboratorio di algoritmi e sistemi di apprendimento dell’EPFL.
“Le persone con una lesione del midollo spinale spesso sperimentano deficit neurologici permanenti e gravi disabilità motorie che impediscono loro di svolgere anche i compiti più semplici, come afferrare un oggetto”, ha detto Billard. “L’assistenza dei robot potrebbe aiutare queste persone a recuperare parte della loro abilità perduta, dal momento che il robot può eseguire compiti al posto loro”.
Muovere il robot con i pensieri
Insieme a José del R. Millán, il prof. Billard ei due gruppi di ricerca hanno sviluppato il programma per computer, che non necessita di controllo vocale o funzione tattile. I pazienti possono spostare il robot solo con i loro pensieri.
I ricercatori hanno iniziato a sviluppare il sistema basandolo prima su un braccio robotico sviluppato anni fa. Può spostarsi avanti e indietro da destra a sinistra, nonché riposizionare gli oggetti davanti a sé e aggirare gli oggetti sul suo percorso.
“Nel nostro studio abbiamo programmato un robot per evitare gli ostacoli, ma avremmo potuto selezionare qualsiasi altro tipo di compito, come riempire un bicchiere d’acqua o spingere o tirare un oggetto”, afferma il prof. Billard.
I ricercatori hanno quindi migliorato il meccanismo del robot per evitare gli ostacoli in modo che fosse più preciso.
Carolina Gaspar Pinto Ramon Correia è uno studente di dottorato presso il laboratorio del Prof. Billard.
“All’inizio, il robot sceglieva un percorso troppo ampio per alcuni ostacoli, portandolo troppo lontano e non abbastanza ampio per altri, tenendolo troppo vicino”, afferma Correia. “Poiché l’obiettivo del nostro robot era quello di aiutare i pazienti paralizzati, dovevamo trovare un modo per consentire agli utenti di comunicare con esso senza bisogno di parlare o muoversi”.
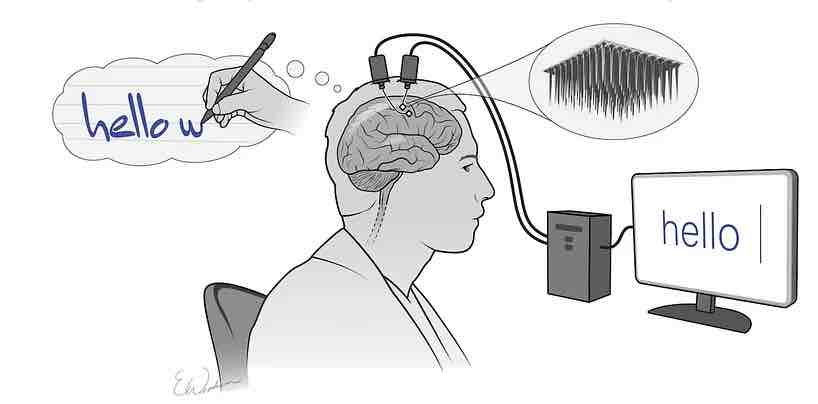
Per fare ciò, hanno dovuto sviluppare un algoritmo in grado di regolare i movimenti del robot basandosi solo sui pensieri del paziente. L’algoritmo è stato collegato a un copricapo dotato di elettrodi per eseguire scansioni EEG dell’attività cerebrale di un paziente.
Il paziente deve solo guardare il robot per utilizzare il sistema. Quando il robot fa una mossa sbagliata, il cervello del paziente emetterà un “messaggio di errore” attraverso un segnale chiaramente identificabile, che indica al robot che sta facendo un’azione sbagliata. All’inizio il robot non capirà perché sta ricevendo il segnale, ma il messaggio di errore viene quindi inserito nell’algoritmo. L’algoritmo utilizza un approccio di apprendimento per rinforzo inverso per capire cosa vuole il paziente e quali azioni dovrebbe intraprendere il robot.
Il processo per tentativi significa che il robot prova diversi movimenti per vedere quale è corretto, e di solito sono necessari solo da tre a cinque tentativi per capire la risposta giusta.
“Il programma di intelligenza artificiale del robot può apprendere rapidamente, ma devi dirglielo quando commette un errore in modo che possa correggere il suo comportamento”, afferma il prof. Millán. “Lo sviluppo della tecnologia di rilevamento per i segnali di errore è stata una delle maggiori sfide tecniche che abbiamo dovuto affrontare”.
Iason Batzianoulis è l’autore principale dello studio.
“Ciò che è stato particolarmente difficile nel nostro studio è stato collegare l’attività cerebrale di un paziente al sistema di controllo del robot, o in altre parole, ‘tradurre’ i segnali cerebrali di un paziente in azioni eseguite dal robot”, afferma Batzianoulis. “Lo abbiamo fatto utilizzando l’apprendimento automatico per collegare un dato segnale cerebrale a un compito specifico. Quindi abbiamo associato le attività ai controlli dei singoli robot in modo che il robot faccia ciò che il paziente ha in mente”.
I ricercatori ritengono che l’algoritmo potrebbe essere utilizzato per controllare le sedie a rotelle.
“Per ora ci sono ancora molti ostacoli tecnici da superare”, afferma il prof. Billard. “E le sedie a rotelle pongono una serie di sfide completamente nuove, dal momento che sia il paziente che il robot sono in movimento”.