Un piccolo robot potrebbe pulire le particelle dall’acqua e dalle celle di trasporto
I ricercatori dell’Università di Tecnologia di Eindhoven hanno sviluppato un piccolo robot di plastica che può essere utilizzato per attrarre e catturare particelle nell’acqua. Potrebbe anche essere usato per trasportare cellule per analisi in dispositivi diagnostici.
La ricerca è stata pubblicata sulla rivista PNAS.
Il robot
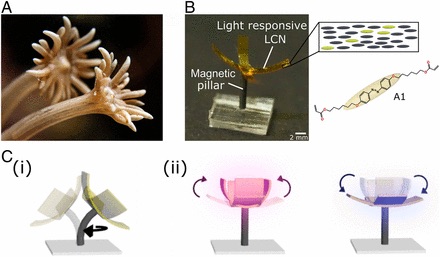
Il piccolo robot è realizzato con polimeri reattivi che possono essere controllati dalla luce e dal magnetismo. Chiamato anche “polipo acquatico senza fili”, si ispira a un polipo di corallo in natura, che è presente nelle barriere coralline e presenta tentacoli.
Nel mondo reale, i polipi viventi possono fare un movimento specifico con il loro gambo per creare una corrente che attira le particelle di cibo.
Secondo il candidato al dottorato Marina Pilz Da Cunha, “Sono stato ispirato dal movimento di questi polipi di corallo, in particolare dalla loro capacità di interagire con l’ambiente attraverso correnti autoprodotte”.
Il polipo artificiale di nuova concezione è 1 per 1 cm, con lo stelo che reagisce al magnetismo e che i tentacoli sono controllati dalla luce.
“La combinazione di due diversi stimoli è rara in quanto richiede una delicata preparazione e assemblaggio del materiale, ma è interessante per la creazione di robot non legati perché consente di eseguire complesse modifiche di forma e attività”, afferma Pilz Da Cunha.
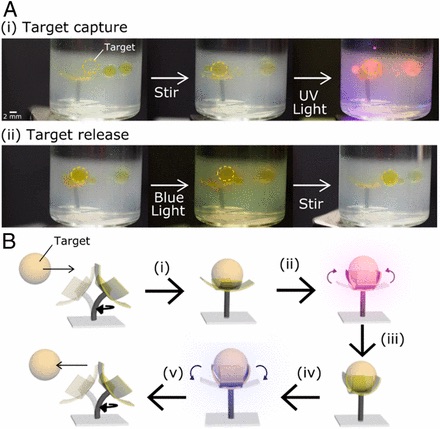
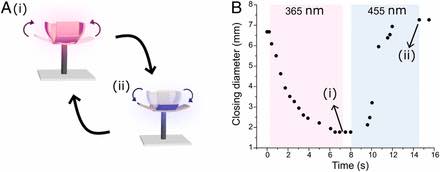
Al fine di controllare i tentacoli, la luce viene illuminata su di loro con diverse lunghezze d’onda. Con l’uso della luce UV, i tentacoli “afferrano”, e mentre sotto la luce blu, “rilasciano”.
subacqueo
Il polipo artificiale è in grado di afferrare e rilasciare oggetti sott’acqua. Il nuovo robot è un progresso rispetto al mini-robot di consegna del pacchetto guidato dalla luce che è stato presentato dai ricercatori all’inizio dell’anno.
Il robot terrestre non era in grado di operare sott’acqua, poiché i polimeri agiscono attraverso effetti fototermici. Contrariamente al modello subacqueo, quello terrestre utilizzava l’energia del calore generato dalla luce, piuttosto che la luce stessa.
“Il calore si dissipa nell’acqua, il che rende impossibile guidare il robot sott’acqua”, ha detto Pilz Da Cunha.
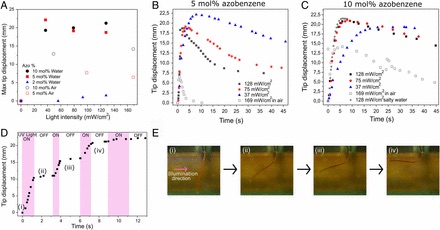
Con queste informazioni, i ricercatori hanno sviluppato un materiale polimerico fotomeccanico in grado di essere controllato solo dalla luce, senza calore.
Un altro importante sviluppo con questo nuovo robot è che può contenere la sua deformazione dopo essere stato attivato dalla luce. Dopo la rimozione degli stimoli, il materiale fototermico torna alla sua forma originale, ma le molecole nel materiale fotomeccanico assumono un nuovo stato. Per questo motivo, diverse forme stabili possono essere mantenute per periodi di tempo più lunghi.
“Ciò aiuta a controllare il braccio della pinza; una volta catturato qualcosa, il robot può continuare a tenerlo premuto fino a quando non viene nuovamente indirizzato dalla luce per rilasciarlo “, afferma Pilz Da Cunha.
Attrarre particelle
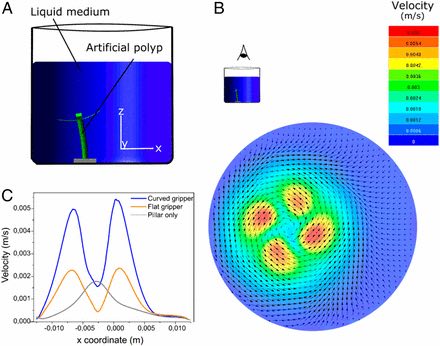
Un magnete rotante si trova sotto il robot che consente allo stelo di circolare attorno all’asse.
Secondo Pilz Da Cunha, “Era quindi possibile spostare effettivamente oggetti galleggianti nell’acqua verso il polipo, nel nostro caso goccioline d’olio”.
Il flusso del fluido può essere modificato dalla posizione dei tentacoli.
“Le simulazioni al computer, con diverse posizioni tentacolari, alla fine ci hanno aiutato a capire e ottenere il movimento dello stelo esattamente nel modo giusto. E per “attrarre” le goccioline di petrolio verso i tentacoli “, afferma Pilz Da Cunha.
Il robot può funzionare indipendentemente dal liquido circostante. Ciò è in contrasto con gli idrogel che vengono spesso utilizzati per applicazioni subacquee, che sono sensibili all’ambiente.
“Il nostro robot funziona allo stesso modo anche in acqua salata, o acqua con contaminanti fuori dall’acqua catturandoli con i suoi tentacoli”, afferma Pilz Da Cunha.
I ricercatori stanno ora lavorando per far collaborare vari polipi diversi, con la possibilità che un polipo passi un pacchetto all’altro. Stanno anche lavorando su robot da nuoto che potrebbero essere utilizzati per applicazioni biomediche.