Gli scienziati sviluppano una nuova formula per robot ad alta efficienza energetica
Gli scienziati dell’esercito hanno sviluppato una nuova formula che sta portando nuove informazioni su come costruire un robot con le gambe ad alta efficienza energetica.
Dagli scarafaggi ai carri armati: la stessa relazione potenza-massa-velocità descrive i sistemi terrestri mobili sia biologici che artificiali lo trovate su htt ps://journals.plos.org/plosone/article?id=10.1371/journal.pone.0249066
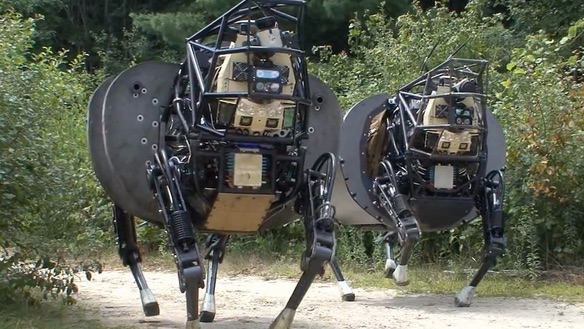
Il comando per lo sviluppo delle capacità di combattimento dell’esercito americano, o DEVCOM, insieme ai Drs. Alexander Kott, Sean Gart e Jason Pusey stanno escogitando nuove idee per costruire piattaforme militari autonome con gambe robotiche. Il team si sta concentrando sul farli funzionare con la stessa efficienza di qualsiasi altro sistema mobile di terra.
L’uso di tali sistemi potrebbe alterare lo sviluppo dei veicoli dell’esercito e, secondo gli scienziati, non sanno ancora perché i sistemi con gambe, ruote e cingoli si adattino alla stessa curva, ma le nuove scoperte sono un passo avanti.
“Se gli sviluppatori di veicoli scoprissero che un certo design richiederebbe più potenza di quella attualmente possibile data una varietà di vincoli del mondo reale, la nuova formula potrebbe indicare esigenze specifiche per una migliore trasmissione e generazione di potenza, o per ripensare ai requisiti di massa e velocità del veicolo”, ha detto Gart.Gli scienziati si sono ispirati a una formula degli anni ’80 che mostra le relazioni tra massa, velocità e consumo di energia degli animali e hanno sviluppato una nuova formula che può essere applicata a un’ampia gamma di sistemi a gambe, ruote e cingoli, come i robot di terra.
Il team crede di essere il primo a raccogliere e studiare le relazioni che emergono da questi dati, nonostante siano in circolazione da 30 anni. I risultati dimostrano che i sistemi a gambe sono efficienti quanto le piattaforme su ruote e cingolate.
“Nel mondo dei veicoli aerei da combattimento senza equipaggio e delle munizioni intelligenti, c’è un ruolo crescente per la fanteria smontata che può avanzare, spesso per più giorni, e attaccare nei terreni più disordinati come montagne, fitte foreste e ambienti urbani”, ha affermato Kott . “Questo perché tale terreno offre la massima copertura e occultamento contro i veicoli aerei senza equipaggio. Ciò, a sua volta, richiede che la fanteria smontata sia assistita da veicoli in grado di muoversi facilmente su un terreno così accidentato. Veicoli con le zampe, possibilmente autonomi, sarebbero molto utili”.
“Negli ultimi 30 anni, gli scienziati militari statunitensi hanno affrontato una serie di sfide nello sviluppo di veicoli autonomi”, ha affermato Kott. “I veicoli terrestri che manovrano su ruote o cingoli e i veicoli aerei che assomigliano a piccoli aeroplani che chiamiamo ala fissa e piccoli elicotteri, che sono ad ala rotante, sono ora più silenziosi e più facili da integrare nelle formazioni di truppe. Ma per le piattaforme con le gambe, molti ostacoli rimangono elusivi e uno enorme li sta rendendo efficienti dal punto di vista energetico.
I soldati non possono permettersi di trasportare carburante o batterie per “robot assetati di energia”, ha detto.
Con la nuova formula, il team ha scoperto che le piattaforme con gambe create dall’uomo dovrebbero essere efficienti quanto le piattaforme su ruote e cingolate.
Il team ha raccolto diversi dati del sistema mobile terrestre e ha studiato sistemi combinati come il Ford Model T.
Secondo Gart, la ricerca aiuterà i progettisti a determinare i compromessi tra potenza, velocità e massa per i futuri robot terrestri per scopi di difesa.
La formula potrebbe anche approssimare la quantità di potenza richiesta da un veicolo.
“L’esercito deve sviluppare obiettivi fattibili ma ambiziosi per i compromessi tra potenza, velocità e massa dei futuri robot terrestri”, ha affermato Kott. “Non è auspicabile basare tali obiettivi sull’esperienza attuale, perché l’hardware militare viene spesso sviluppato e utilizzato per più anni e persino decenni; pertanto, gli specificatori e i progettisti di tale hardware devono basare i loro obiettivi, competitivi ma raggiungibili, su opportunità tecnologiche future non necessariamente comprese appieno al momento della progettazione.
