Gli ingegneri sviluppano robot senza elettronica in grado di monitorare le condizioni dell’acqua
Un team di ingegneri della Duke University ha sviluppato un nuovo robot morbido e privo di elettronica che potrebbe svolgere un ruolo importante nel monitoraggio delle condizioni ambientali in futuro. Il robot ha la forma di una libellula e può sfiorare l’acqua reagendo a condizioni ambientali come pH, temperatura e presenza di olio.
La nuova dimostrazione della prova di principio è stata descritta in dettaglio nella rivista Advanced Intelligent Systems il 25 marzo.
I robot morbidi continuano ad avanzare e migliorare e stanno crescendo in importanza grazie alla loro versatilità. Sono in grado di manipolare oggetti delicati come i tessuti biologici e possono inserirsi in spazi più ristretti rispetto ad altri robot rigidi.
Shyni Varghee, il responsabile dell’idea, è professore di ingegneria biomedica, ingegneria meccanica e scienza dei materiali e chirurgia ortopedica alla Duke.
Vardham Kumas è uno studente di dottorato nel laboratorio di Varghese e primo autore dell’articolo.
“Ho ricevuto un’e-mail da Shyni dall’aeroporto che diceva che aveva un’idea per un robot morbido che utilizza un idrogel autorigenerante che il suo gruppo ha inventato in passato per reagire e muoversi in modo autonomo”, ha detto Kumar. “Ma quella era l’estensione dell’email e non la sentii più per giorni. Quindi l’idea è rimasta nel limbo per un po ‘finché non ho avuto abbastanza tempo libero per perseguirla, e Shyni ha detto di provarci. “
Idrogel Autoguarigione
Nel 2012, il laboratorio di Varghese ha sviluppato un idrogel autorigenerante in grado di reagire ai cambiamenti di pH in pochi secondi. Un cambiamento di acidità provoca la formazione di nuovi legami sull’idrogel e questo può essere invertito quando il pH ritorna al livello originale.
Parte della nuova idea di Varghese era quella di utilizzare l’idrogel su un robot morbido per consentirgli di viaggiare attraverso l’acqua mentre rilevava i cambiamenti di pH in luoghi diversi. Ha cercato un modo per il laboratorio di inventare questo tipo di robot che agisce come un sensore ambientale autonomo.
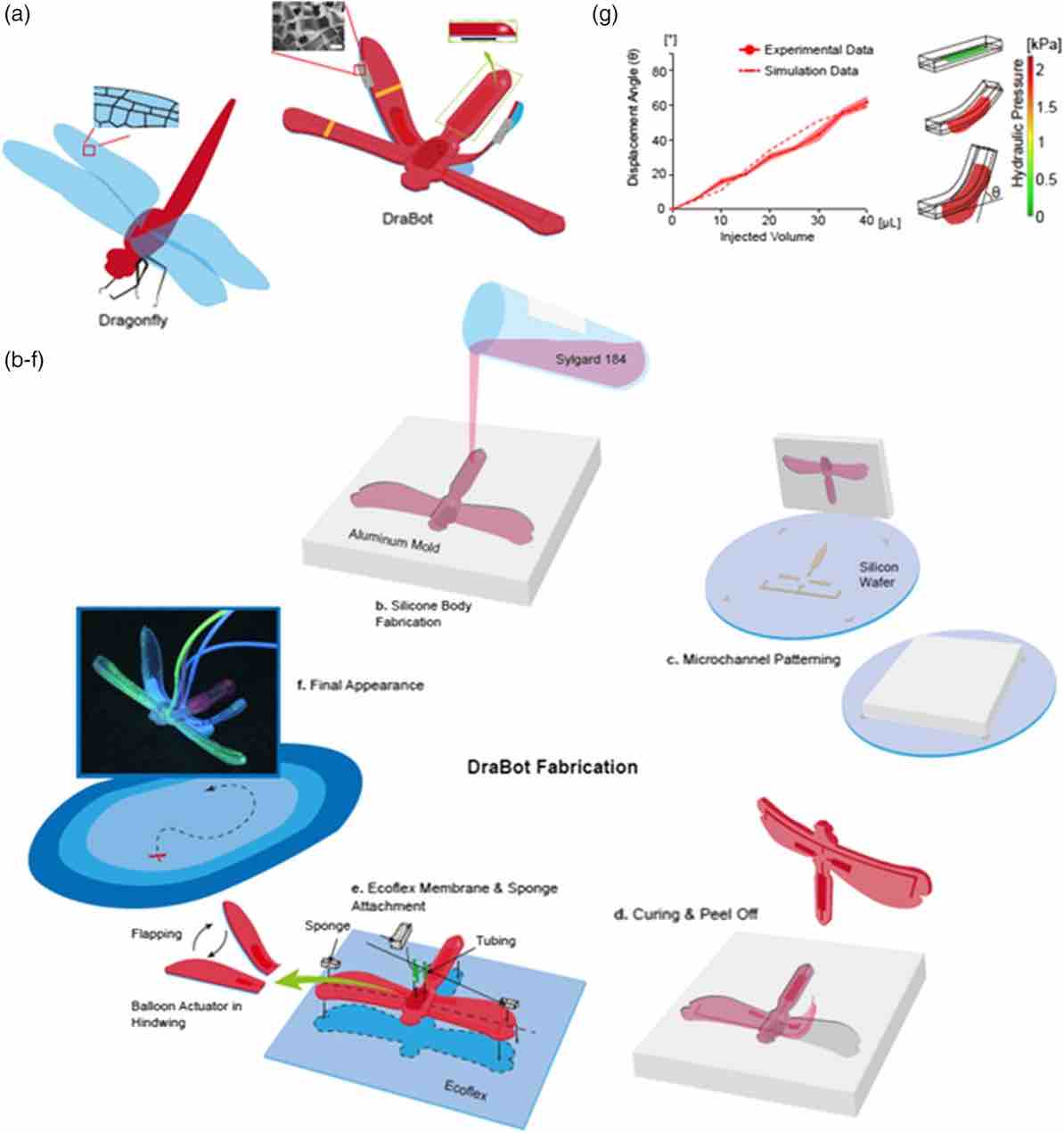
Insieme a Ung Hyun Ko, un borsista post-dottorato nel laboratorio di Varghese, Kumar ha progettato un robot morbido basato su una mosca. Dopo vari tentativi, il team ha deciso la forma di una libellula, ed è stata progettata con una rete di microcanali interni che le consentono di essere controllata dalla pressione dell’aria.
Il corpo del robot morbido è lungo circa 2,25 pollici e la sua apertura alare è di 1,4 pollici. È stato creato versando il silicone in uno stampo di alluminio prima di infornarlo. Si è fatto affidamento sulla litografia morbida per creare canali interni collegati con tubi in silicone.
“Ottenere DraBot per rispondere ai controlli della pressione dell’aria su lunghe distanze utilizzando solo autoattuatori senza alcuna elettronica è stato difficile”, ha detto Ko. “Questa è stata sicuramente la parte più impegnativa.”
DraBot controlla la pressione dell’aria che entra nelle sue ali e i microcanali trasportano l’aria nelle ali anteriori. Quindi fuoriesce attraverso i fori che sono puntati direttamente nelle ali posteriori. DraBot non si muoverà se il flusso d’aria è bloccato da entrambe le ali posteriori abbassate. Tuttavia, se entrambe le ali sono alzate, si sposta in avanti.
Il team ha anche sviluppato attuatori a palloncino per dare un maggiore controllo e si trovano sotto ciascuna delle ali posteriori vicino al corpo del robot. Quando questi sono gonfiati, l’ala si arriccia verso l’alto ei ricercatori possono controllare dove va il robot cambiando quali ali sono in alto o in basso.
“Eravamo felici quando siamo stati in grado di controllare DraBot, ma si basa su cose viventi”, ha detto Kumar. “E gli esseri viventi non si limitano a muoversi da soli, ma reagiscono al loro ambiente.”
Il team ha utilizzato l’idrogel autorigenerante dipingendo una serie di venti con esso, il che ha reso DraBot reattivo a qualsiasi cambiamento nel pH dell’acqua. Se è troppo acido, l’ala anteriore di un lato si fonde con la parte posteriore, facendo ruotare il robot in cerchio anziché dritto. Dopo che il pH ritorna a un livello normale, l’idrogeno si inverte e le ali si separano ancora una volta, consentendo a DraBot di rispondere completamente ai comandi.
I ricercatori hanno anche aggiunto materiali sensibili alla temperatura, che consentono a DraBot di scremare l’acqua e assorbire l’olio con le spugne. Il colore delle spugne cambia a seconda del colore dell’olio, e quando l’acqua è troppo calda anche le ali del robot cambiano colore.
I nuovi sviluppi potrebbero aiutare a combattere i problemi ambientali in futuro. Ad esempio, un tale robot potrebbe rilevare l’acidificazione dell’acqua dolce, che colpisce varie regioni geologicamente sensibili. Potrebbe anche aiutare a rilevare in anticipo le fuoriuscite di petrolio o rilevare i primi segni di marea rossa e sbiancamento dei coralli.