ReMotion: L’Avanguardia della Telepresenza Robotica da Parte dei Ricercatori della Cornell
Mose Sakashita con il robot ReMotion – Cornell University I segnali non verbali svolgono un ruolo fondamentale nelle interazioni umane di ogni giorno, creando un livello di coinvolgimento che le sole parole non possono raggiungere. Ma che succede se riuscissimo a replicare questi segnali in un contesto remoto?
Questo interrogativo è al centro di un innovativo progetto proposto dalla Cornell University, che ha dato vita a un robot, denominato ReMotion. Questo dispositivo può rappresentare un utente remoto in un ambiente fisico, riproducendo i suoi movimenti in tempo reale e trasmettendo così informazioni non verbali di vitale importanza.
Superare il Divario nella Comunicazione Non Verbale In un’epoca sempre più digitale, si fa sempre più sentire l’esigenza di promuovere una comunicazione efficace malgrado le distanze fisiche. Mose Sakashita, un dottorando in Scienze dell’Informazione presso Cornell e autore principale del lavoro “ReMotion: Supporting Remote Collaboration in Open Space with Automatic Robotic Embodiment”, ha espresso questa preoccupazione:
“Nei contesti remoti, perdiamo segnali non verbali e impliciti, come i gesti di puntamento o la percezione dello sguardo di un altro, che sono fondamentali per l’efficacia delle attività progettuali.”
ReMotion risponde a queste preoccupazioni fungendo da “alter ego” snello e alto quasi due metri dell’utente remoto. Il dispositivo è dotato di un monitor che funge da testa, ruote omnidirezionali al posto dei piedi e un sofisticato software del motore di gioco che fa da cervello. Tramite un altro dispositivo prodotto da Cornell, chiamato NeckFace, che l’utente remoto indossa, ReMotion può imitare con precisione i movimenti della testa e del corpo dell’utente.
Un Salto Avanti nella Collaborazione Remota Sebbene i robot di telepresenza non siano una novità nel panorama tecnologico, la maggior parte di essi richiede un controllo manuale da parte degli utenti remoti, spesso distogliendo l’attenzione dalle loro attività principali. ReMotion, invece, modifica completamente la situazione, offrendo un’esperienza fluida e automatizzata che permette all’utente di concentrarsi completamente sulla sua attività. Inoltre, ReMotion supera altri sistemi come la realtà virtuale e la collaborazione in realtà mista, che richiedono un coinvolgimento attivo da parte dell’utente e possono compromettere la consapevolezza periferica.
In uno studio preliminare, la maggior parte dei partecipanti ha riferito di sentirsi più connessi con i loro colleghi remoti quando utilizzavano ReMotion rispetto ad altri sistemi telerobotici. Questa sensazione di connessione è di fondamentale importanza, in quanto l’attenzione condivisa
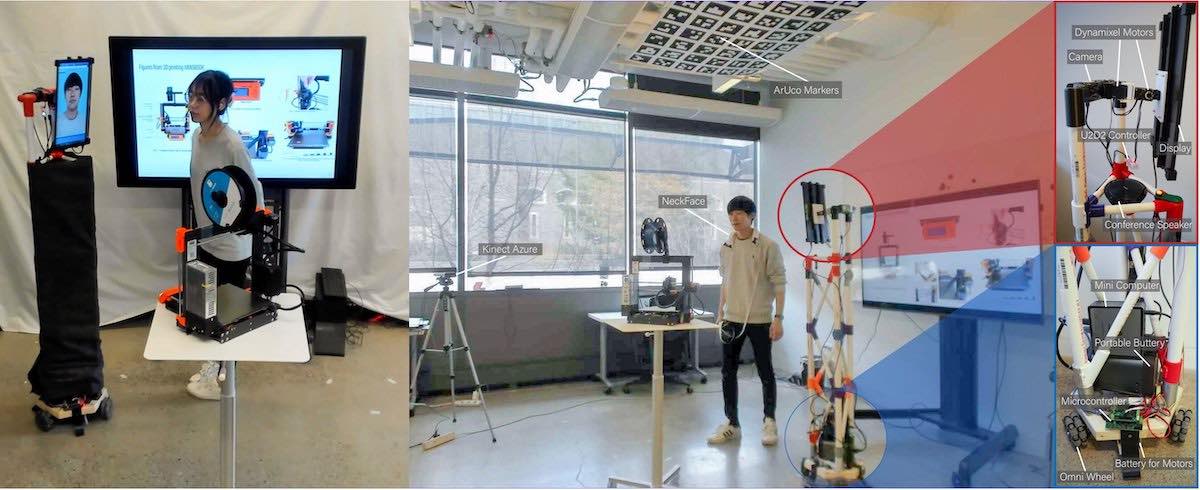
Mostriamo entrambi i siti (sinistra e centro).
In ogni sito, il sistema include (Centro): un Kinect Azure per acquisire i movimenti del corpo, un sistema NeckFace indossato dall’utente locale per acquisire le espressioni facciali e della testa, il robot di incarnazione e la scheda di marcatori ArUco utilizzata dal robot per il feedback di posizione.
Il proxy robotico ReMotion (a destra) utilizza una piattaforma omnidirezionale per la flessibilità del movimento e un display articolato per rendere l’orientamento della testa e le espressioni facciali.
Credito:
Atti della conferenza CHI 2023 sui fattori umani nei sistemi informatici (2023).
DOI: 10.1145/3544548.3580699