Tecnologia di computer grafica adattata per la robotica leggera
Gli scienziati dell’Università della California, di Los Angeles (UCLA) e della Carnegie Mellon University hanno adattato una sofisticata tecnologia di computer grafica per la robotica leggera. Hanno usato la stessa tecnologia su cui fanno affidamento gli animatori di film e gli sviluppatori di videogiochi per creare immagini molto dettagliate, come capelli e tessuti nei film animati. Ora viene utilizzato dagli scienziati per simulare robot molli e artificiosi e i loro movimenti.
Il lavoro è stato pubblicato su Nature Communications il 6 maggio. L’articolo è intitolato ” Simulazione dinamica di robot soft articolati “.
Khalid Jawed è l’autore dello studio e un assistente professore di ingegneria meccanica e aerospaziale presso la UCLA Samueli School of Engineering.
“Abbiamo ottenuto risultati più rapidi rispetto alla simulazione in tempo reale di robot soft, e questo è un passo importante verso robot così autonomi e in grado di pianificare le proprie azioni da soli”, ha affermato Jawed. “I robot morbidi sono realizzati in materiale flessibile che li rende intrinsecamente resistenti ai danni e potenzialmente molto più sicuri nell’interazione con l’uomo. Prima di questo studio, prevedere il movimento di questi robot è stato impegnativo perché cambiano forma durante il funzionamento. “
Tecnologie DER e FEM
Un algoritmo chiamato aste elastiche discrete (DER) viene spesso utilizzato nella realizzazione di film per animare oggetti a flusso libero. In una frazione di secondo, DER è in grado di prevedere centinaia di movimenti.
I ricercatori hanno deciso di utilizzare DER per sviluppare un motore fisico in grado di simulare i movimenti di robot di ispirazione bio. Volevano anche usarlo per robot che esistono in ambienti difficili, come quelli sviluppati per Marte o sott’acqua.
Anche il metodo degli elementi finiti (FEM) è una tecnologia basata su algoritmi ed è in grado di simulare i movimenti di robot solidi e rigidi. Tuttavia, FEM non è l’ideale quando si tratta di movimenti morbidi e naturali e del livello richiesto di dettagli. Oltre a ciò, FEM si basa su molta potenza computazionale e richiede lunghi periodi di tempo.
Per sviluppare e simulare robot soft, i robot hanno fatto affidamento su metodi di prova ed errore.
Carmel Majidi è professore associato di ingegneria meccanica presso il College of Engineering di Carnegie Mellon.
“I robot realizzati con materiali duri e non flessibili sono relativamente facili da modellare utilizzando gli strumenti di simulazione al computer esistenti”, ha affermato Majidi. “Fino ad ora, non ci sono stati buoni strumenti software per simulare robot morbidi e morbidi. Il nostro lavoro è uno dei primi a dimostrare come i robot morbidi possano essere simulati con successo utilizzando lo stesso software di computer grafica utilizzato per modellare capelli e tessuti in film di successo e film animati. “
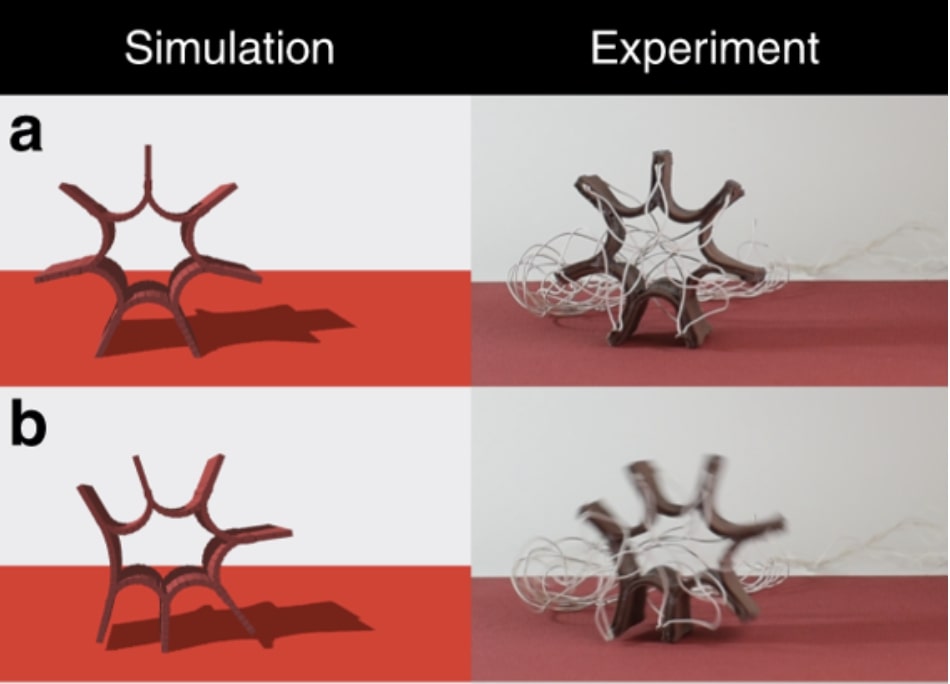
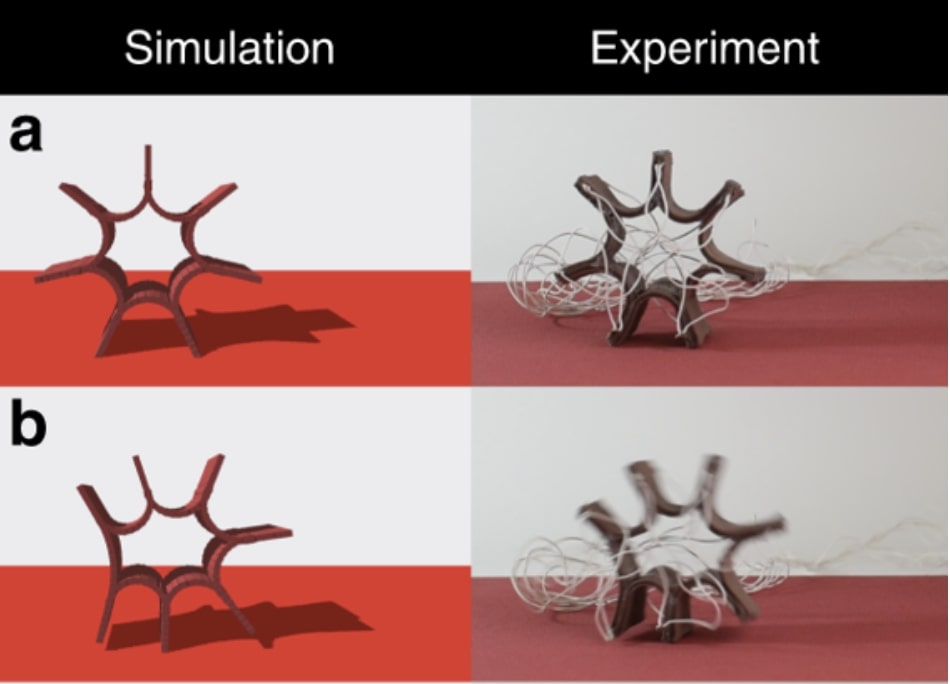
I ricercatori hanno iniziato a collaborare nel Soft Machines Lab di Majidi oltre tre anni fa. Il loro progetto più recente ha coinvolto simulazioni di corsa con Jawed nel suo laboratorio di ricerca presso l’UCLA e Majidi eseguendo esperimenti fisici per confermare i risultati della simulazione.
Lo strumento di simulazione riduce drasticamente il tempo necessario per portare un robot morbido al punto di applicazione.
Supporto dall’Ufficio di ricerca dell’esercito
La ricerca è stata parzialmente finanziata dall’Esercito Research Office, che fa parte del laboratorio di ricerca dell’esercito del comando di sviluppo delle capacità di combattimento dell’esercito americano.
Il dott. Samuel Stanton è un responsabile del programma presso l’Esercito Research Office.
“I progressi sperimentali nella soft-robotica hanno superato la teoria per diversi anni”, ha affermato Stanton. “Questo sforzo è un passo significativo nella nostra capacità di prevedere e progettare dinamiche e controllo in robot altamente deformabili che operano in spazi ristretti con contatti complessi e ambienti in costante cambiamento.”
La tecnologia viene ora esplorata e provata su altri tipi di robot soft. Una di queste aree è costituita da robot basati sui movimenti di batteri e stelle marine, che potrebbero essere utilizzati in attività di oceanografia come il monitoraggio delle condizioni dell’acqua di mare o l’ispezione della vita marina.