Gli scienziati creano robot leggeri ispirati alle articolazioni dei ragni
Gli scienziati del Max Planck Institute for Intelligent Systems in Germania e dell’Università del Colorado Boulder negli Stati Uniti hanno sviluppato nuovi robot leggeri utilizzando i principi delle articolazioni dei ragni.
La ricerca intitolata ” Attuatori elettroidraulici ispirati al ragno per giunti veloci e ad azionamento morbido ” è stata pubblicata su Advanced Science.
I ragni servono spesso come ispirazione nel campo della robotica, soprattutto perché muovono i loro arti attraverso meccanismi di attuazione idraulica durante la caccia alle prede, che gli scienziati cercano di implementare nei robot.
Utilizzando questi principi, il team di scienziati è stato in grado di guidare robot articolati senza componenti e connettori ingombranti, il che aiuta a evitare che vengano appesantiti e ad aumentare la portabilità e la velocità.
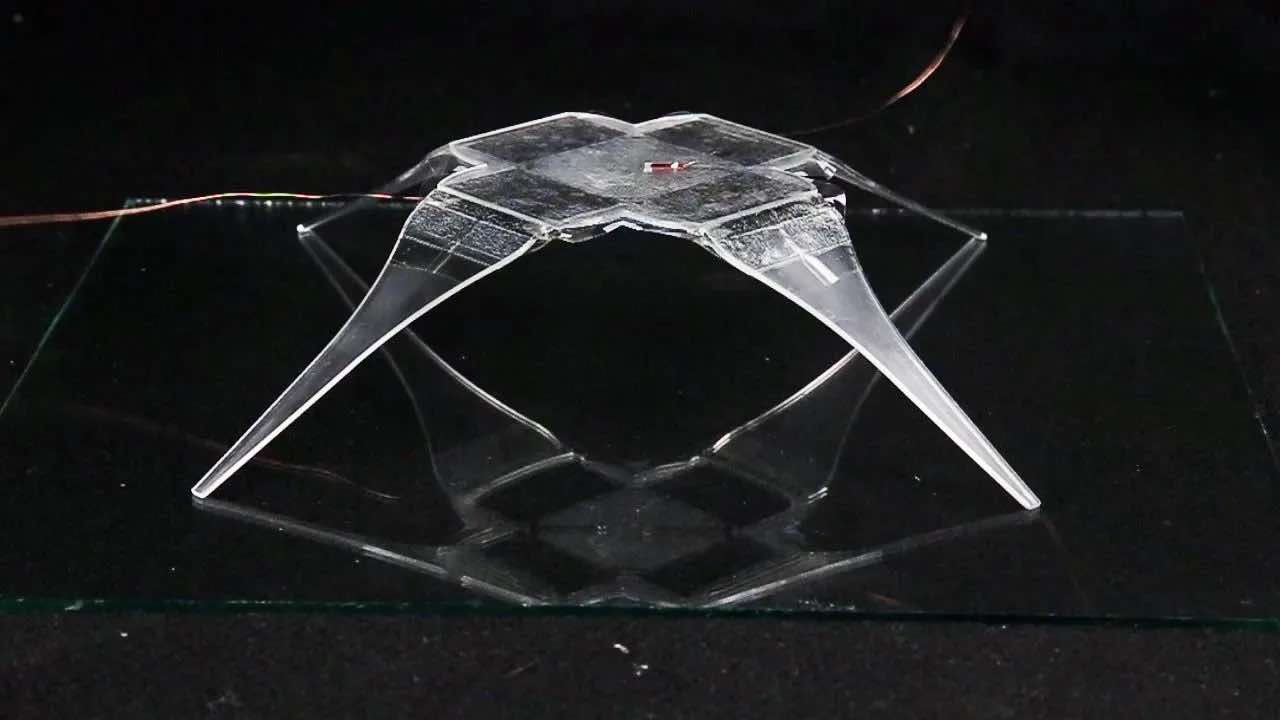
A causa delle strutture leggere e semplici utilizzate nella sua costruzione, il robot può saltare 10 volte la sua altezza.
Aracno-bot elettroidraulico un affascinante peso leggero
Giunti SES
Gli scienziati si sono affidati ai giunti elettroidraulici ad azionamento morbido ispirati al ragno, o giunti SES, per ottenere prestazioni elevate nei robot. I giunti possono essere configurati in vari modi, anche all’esterno di un aracno-bot.
Il documento di ricerca descrive in dettaglio un’articolazione bidirezionale, un arto artificiale multisegmentato e una pinza a tre dita, che può essere utilizzata per afferrare e raccogliere oggetti. Tutte le diverse creazioni hanno tratti simili. Sono leggeri, semplici e presentano prestazioni elevate, il che significa che sono utili per i sistemi robotici che richiedono movimenti rapidi e interagiscono con ambienti diversi.
Le articolazioni SES si basavano sulla tecnologia HASEL precedentemente inventata dal team per costruire muscoli artificiali. Le articolazioni SES imitano un meccanismo di esoscheletro che ha elementi sia rigidi che più morbidi, simile al modo in cui un ragno estende le sue gambe attraverso forze idrauliche.
Sviluppare i robot ispirati ai ragni
Gli scienziati hanno prima creato un sacchetto flessibile fatto di sottili pellicole di plastica, che sono state riempite con un dielettrico liquido. Gli elettrodi sono stati quindi posizionati su ciascun lato della sacca e le tasche fungevano da attuatori, con la potenza idraulica generata dalle forze elettrostatiche.
La sacca è collegata a un giunto rotante e quando viene applicata un’alta tensione tra gli elettrodi, il dielettrico liquido si sposta all’interno della sacca e l’articolazione si flette. I giunti SES possono ruotare fino a 70 gradi, il che porta a coppie elevate, e possono tornare molto facilmente alla posizione di partenza.
Christoph Keplinger è direttore del dipartimento dei materiali robotici presso il Max Planck Institute for Intelligence Systems.
“I giunti SES sono molto semplici e leggeri, poiché non ci sono componenti periferici che appesantiscono il robot”, afferma Keplinger. “Molte applicazioni per robot morbidi richiedono attuatori versatili. Questi giunti ispirati ai ragni consentono un’elevata funzionalità e consumano solo poca energia, sono facili ed economici da realizzare (le plastiche che utilizziamo sono per l’imballaggio degli alimenti) e la loro produzione è facilmente scalabile. Queste sono tutte qualità fondamentali per la progettazione dei robot, che possono muoversi in molti modi diversi e manipolare una varietà di oggetti senza romperli”.
Gli scienziati hanno dimostrato la versatilità dei giunti SES attraverso l’applicazione di una pinza a tre dita. Se la pinza si basasse su una struttura muscolare, sarebbe stata ostruita durante il tentativo di afferrare un oggetto. Ma con i giunti SES come cerniere, è necessario molto meno spazio.
Nicholas Kellaris è il primo autore dell’articolo.
“La ricerca si distingue perché possiamo utilizzare un’ampia varietà di materiali, anche la plastica utilizzata per realizzare sacchetti di patatine per creare le buste”, afferma Kellaris. “In questo modo possiamo implementare SES in un’ampia varietà di geometrie con caratteristiche di attuazione specificamente sintonizzate”.
Phillip Rothemund è il secondo autore della pubblicazione.
“L’obiettivo finale della nostra ricerca non era quello di creare un robot ragno”, aggiunge Rothemund. “Volevamo sviluppare un giunto attivo e all’avanguardia che si potesse inserire in qualsiasi tipo di robot”.